
멀티콥터는 여러 개의 아래쪽으로 추진하는 모터/프로펠러 장치의 속도를 높이거나 늦추어 움직임을 제어하는 기계적으로 단순한 공중 비행체입니다.
멀티콥터는 공기역학적으로 불안정하며 안정적인 비행을 위해 온보드 컴퓨터(Flight Controller)가 절대적으로 필요합니다. 결과적으로 그들은 “Fly by Wire” 시스템이며 컴퓨터가 작동하지 않는다면 비행하고 있는 것이 아닙니다. 자동 조종 장치는 작은 온보드 자이로스코프와 가속도계(스마트폰에서 볼 수 있는 것과 동일)의 데이터를 결합하여 방향과 위치의 정확한 추정치를 유지합니다.
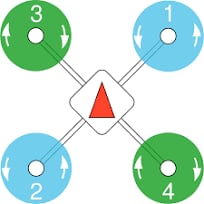
위에 표시된 쿼드콥터는 가장 단순한 유형의 멀티콥터로 각 모터/프로펠러가 양쪽에 있는 두 개의 모터와 반대 방향으로 회전합니다(즉, 프레임의 반대쪽 모서리에 있는 모터는 같은 방향으로 회전).
쿼드콥터는 한쪽에 있는 두 모터의 속도를 높이고 다른 두 모터의 속도를 늦춤으로써 롤 및 피치 회전을 제어할 수 있습니다. 예를 들어 쿼드콥터가 왼쪽으로 구르고 싶다면 프레임의 오른쪽에 있는 모터의 속도를 높이고 왼쪽에 있는 두 모터의 속도를 늦출 것입니다. 마찬가지로 앞으로 회전하려는 경우 뒤쪽 두 모터의 속도를 높이고 앞쪽 두 모터의 속도를 늦춥니다.
콥터는 서로 대각선으로 있는 두 모터의 속도를 높이고 다른 두 모터의 속도를 줄여 왼쪽 또는 오른쪽으로 회전(일명 “요”)할 수 있습니다.
수평 운동은 차량이 원하는 이동 방향으로 기울어지도록 일부 모터의 속도를 일시적으로 높이거나 낮추고 모든 모터의 전체 추력을 증가시켜 차량이 앞으로 쏠 수 있도록 합니다. 일반적으로 차량이 더 기울어질수록 더 빨리 이동합니다.
고도는 동시에 모든 모터의 속도를 높이거나 낮추어 제어합니다.
MultiCopter와 UAV/Drone의 차이점은 무엇입니까?
멀티콥터는 자율 비행이 가능할 때 UAV 또는 드론이 됩니다. 일반적으로 이것은 가속도계 및 자이로 정보를 가져와 기압계 및 GPS 데이터와 결합하여 비행 컨트롤러가 방향뿐만 아니라 위치도 이해하도록 하는 것을 의미합니다.



