
강좌 영상
호환되는 RC 프로토콜
ArduPilot 자동 조종 장치는 다음 수신기 출력 프로토콜과 호환됩니다.
- PPM-Sum 수신기
- SBus 수신기
- IBUS 수신기
- FPort 수신기
- Spektrum SRXL2, DSM, DSM2 및 DSM-X 위성 수신기
- 멀티플렉스 SRXL 버전 1 및 버전 2 수신기
- CRSF 수신기 (ExpressLRS 시스템 포함)
- 그라우프너 SUM-D
- 외부 인코더를 사용하여 PPM-Sum으로 인코딩된 병렬 PWM 출력(아래 참조)
수신기 연결
위의 모든 프로토콜에 대해 ArduPilot은 RC 수신기 시스템의 프로토콜을 자동 감지합니다. 그러나 프로토콜 및 자동 조종 장치 유형에 따라 자동 조종 장치에 대한 물리적 연결이 다를 수 있습니다.
SRXL2, CRSF 및 ELRS와 같은 일부 프로토콜에는 전체 UART 연결이 필요합니다.
또한 FPort와 같이 원격 측정을 제공하는 다른 프로토콜은 일반적으로 원격 측정을 얻기 위해 양방향 반이중 연결이 필요합니다. 이러한 프로토콜의 경우 UART의 TX 출력을 수신기의 직렬 입력에 연결해야 합니다. F7 및 H7 보드에서 일부 추가 구성으로 UART RX 입력에 연결할 수도 있습니다.
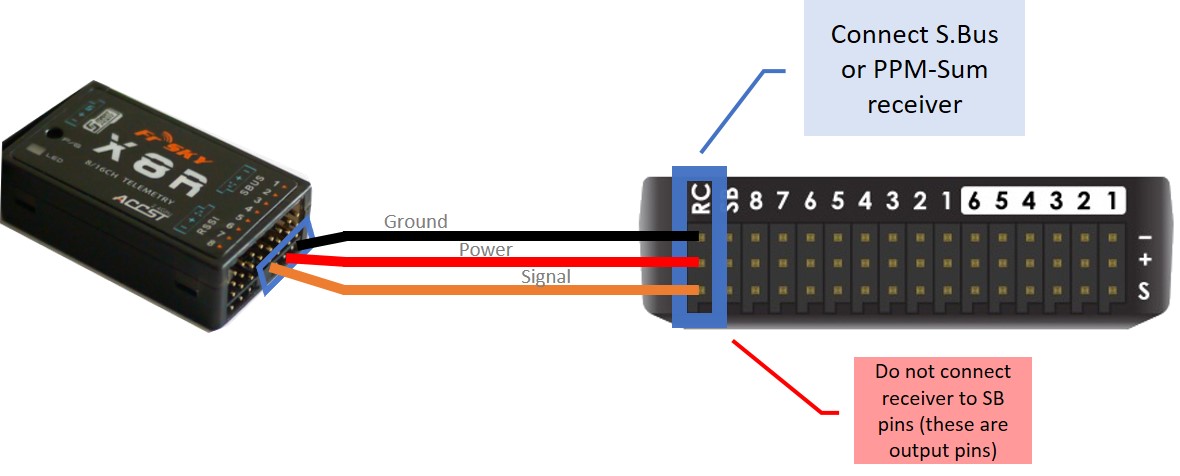
PPM-Sum/SBus/IBus
이러한 수신기는 일반적으로 자동 조종 장치의 RCin 또는 SBUS 입력 핀에 연결됩니다.
예를 들어 PPM-Sum 수신기 또는 SBus 수신기를 Pixhawk에 연결하려면 접지(검은색), 전원(빨간색) 및 신호(일반적으로 아래 다이어그램에서 흰색-주황색) 와이어를 Pixhawk의 RC 핀에 연결합니다.
팁
PixHawk 스타일 자동 조종 장치에서 SBus 출력을 활성화하는 매개변수는 BRD_SBUS_OUT 입니다 . 이것은 SBus를 서보와 같은 다른 장치에 외부적으로 전달하기 위한 것입니다. 수신기를 RCin 또는 SBus In에 연결하지 마십시오.
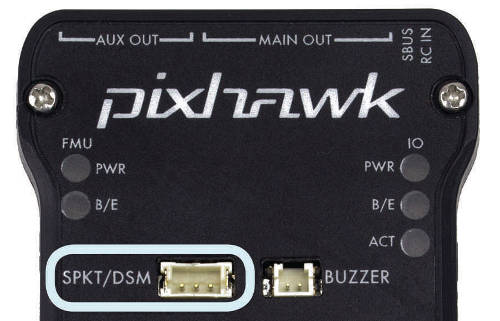
DSM/DSM2/DSM-X/SRXL/SUM-D
별도의 입력을 제공하지 않는 자동 조종 장치의 경우 DSM위와 같이 연결할 수 있습니다. 그러나 IOMCU(Pixhawk/Cube 제품군)를 사용하는 자동 조종 장치의 성능상의 이유로 자동 조종 장치의 DSM입력 연결을 적극 권장합니다.
FPort/FPort2
FPort는 한 방향으로 SBus RC를 사용하고 다른 방향으로 직렬 원격 측정을 사용하는 양방향 프로토콜입니다. RC 부분은 마치 SBus인 것처럼 자동 조종 장치에 연결될 때 디코딩될 수 있지만 내장된 원격 측정은 손실됩니다. 자동 조종 장치 직렬 포트 중 하나에 대한 연결에 대한 자세한 내용은 FPort 설정 설명서를 참조하십시오 .
SRXL2/CRSF/ELRS
이러한 양방향 프로토콜은 직렬 포트를 사용해야 합니다. 설정 및 연결은 아래 링크를 참조하십시오.
직렬 포트에 대한 RC 입력
메모
ArduPilot 펌웨어 릴리스 4.0 이상에서는 직렬 포트 프로토콜이 23으로 설정된 경우(예: UART의 TX 핀 연결이 필요한 PPM 또는 SRXL2/CRSF/ELRS 제외) 모든 UART RX 입력이 모든 프로토콜을 자동 감지합니다. TELEM2 UART용 SERIAL2_PROTOCOL 이 사용됨).
직렬 포트 전송 속도는 직렬 RC 프로토콜이 감지되면 펌웨어에 의해 자동으로 설정 및 제어됩니다.
무선 시스템 선택
선택은 범위, 원격 측정 요구 사항, 비용, 기존 장비와의 호환성 등 여러 요인에 따라 달라집니다. 대부분의 제조업체는 종종 기능이 다른 다양한 모델을 제공합니다. 더 경제적인 송신기 및 수신기 버전을 제공하는 다른 제조업체에서 많은 시스템을 리버스 엔지니어링 및 “복제”했습니다. 많은 송신기는 여러 프로토콜을 제공하고 OpenTX 펌웨어를 기반으로 하며 매우 유연하며 LUA 스크립트를 사용하여 LCD 화면에 원격 측정 데이터를 표시할 수 있습니다.
범위
RC 제어 범위는 사용된 시스템, 설치, 사용된 안테나, 지형 및 기상 조건에 따라 크게 달라집니다. 그러나 일반적으로 여기서 논의할 목적으로 RC 시스템은 단거리(2km 이하), 중거리(2-10km) 및 장거리(>10km)로 분류할 수 있습니다. 또한 단방향(Vehicle to Transmitter) 또는 양방향(Vehicle to Transmitter) 원격 측정을 제공할 수 있습니다.



