
비행 모드는 드론이 명령 및 RC 신호에 반응하는 방식을 결정합니다. 모드 변경은 일반적으로 RC 송신기 스틱 중 하나에 매핑됩니다.
비행 모드를 구성하려면:
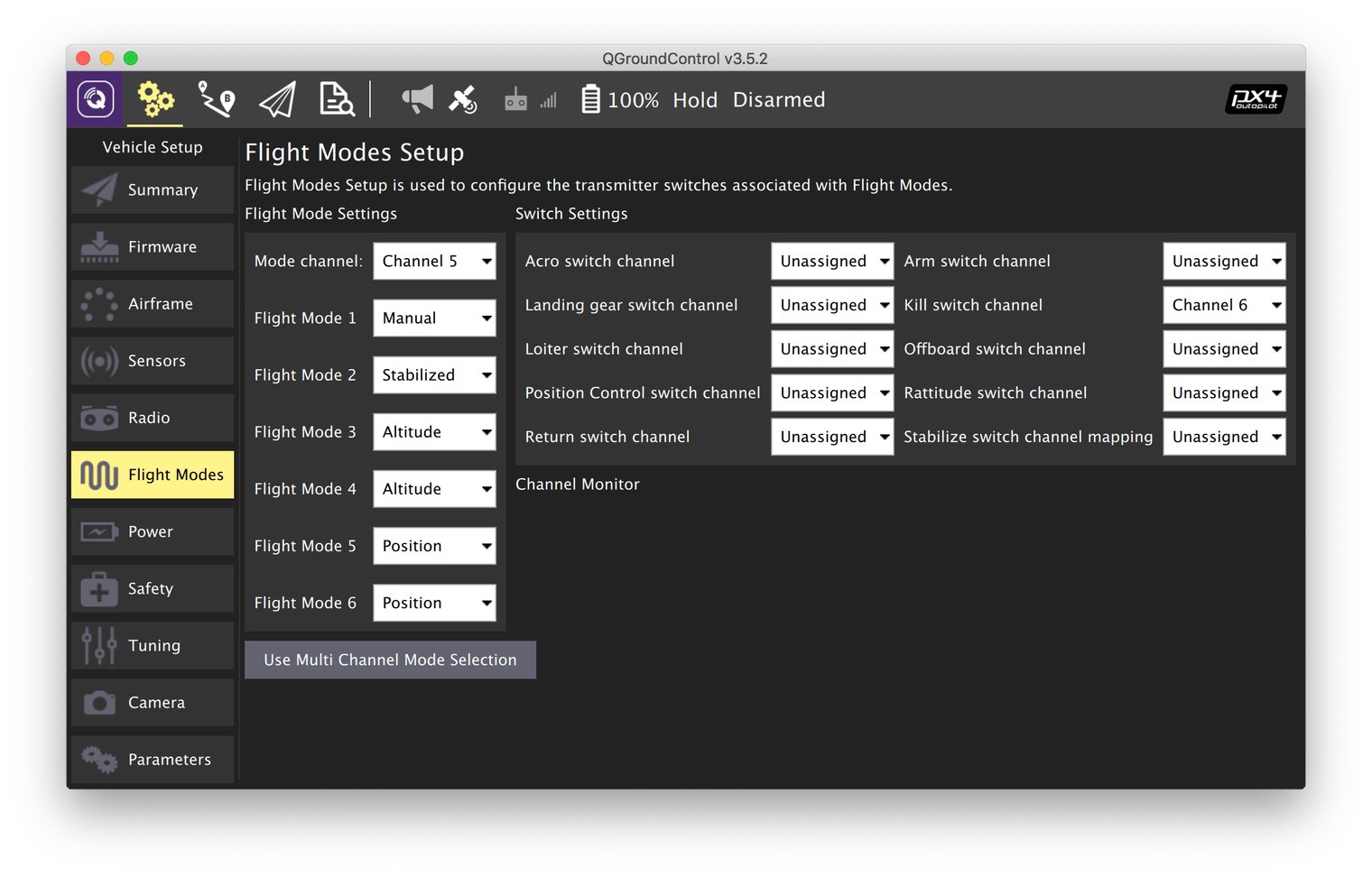
- QGroundControl에서 설정 패널을 엽니다 .
- 비행 모드 메뉴를 선택합니다 .
- 모드 채널을 SwC 스위치( 채널 5 )로 설정합니다 .
- 선택적으로 Emergency Kill Switch 채널을 SwA 스위치( 채널 6 )로 설정합니다.
- 원하는 비행 모드를 설정합니다.다음 비행 모드를 권장합니다.
- 비행 모드 1: 안정화됨
- 비행 모드 4: 고도
- 비행 모드 6: 위치
- 스위치 위치를 변경하여 모드 전환을 확인하십시오.
- 비상 모터 정지( Kill 스위치 ) 로 SwA(채널 6)를 선택합니다.
스위치 채널 할당은 본인의 조종 습관에 따라 변경해서 사용 합니다.
비행 모드 설명
수동 제어
수동 모드에서는 조종사가 드론을 직접 조종합니다. GPS, 컴퓨터 비전 데이터 및 기압계는 사용되지 않습니다. 이 모드에서 비행하려면 훌륭한 드론 조종 기술이 필요합니다.
- STABILIZED / MANUAL — 수평 방향이 안정화된 모드입니다. 스로틀, 콥터 피치 및 롤, 요율을 제어할 수 있습니다.
- ACRO — 스로틀 및 콥터의 피치 속도, 롤 속도 및 요 속도 제어. 드론 레이서와 3D 파일럿 스턴트 쇼에서 사용됩니다.
- RATTITUDE — 중앙에서 오른쪽 스틱은 STABILIZED와 유사하며 가장자리에서 ACRO 모드로 전달됩니다.
보조 비행 모드
- ALTCTL (ALTITUDE) — 고도 비율, 피치, 롤 및 요 각속도 제어. 기압계 또는 다른 고도 소스가 필요합니다.
- POSCTL (POSITION) — 고도 비율, 전진/후진 및 좌/우 속도, 요 각속도 제어. 가장 쉬운 비행 모드입니다. 기압계, GPS, 컴퓨터 비전 및 기타 센서가 사용됩니다.
자동 비행 모드
자율 비행 모드에서 쿼드콥터는 송신기의 제어 신호를 무시하고 프로그램을 사용하여 비행합니다.
- OFFBOARD 모드는 Raspberry Pi 와 같은 외부 컴퓨터를 사용합니다 . 이 모드는 자율 비행을 위해 Clover에서 사용됩니다 .
- AUTO.MISSION – PX4는 드론에 미리 로드된 임무를 사용합니다(임무는 MAVLink를 통해 지상 관제소를 사용하여 업로드됨 ). 이 모드는 일반적으로 예를 들어 사진 측량에서 GPS를 위치 소스로 사용하여 미리 계획된 경로로 이동하는 데 사용됩니다.
- AUTO.RTL – 콥터가 자동으로 이륙(발사) 지점으로 돌아갑니다.
- AUTO.LAND – 콥터가 현재 위치에 착륙합니다.



