
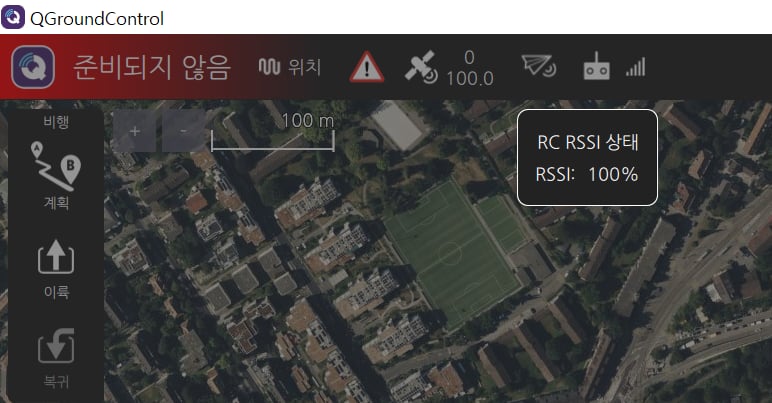
조종기와 수신기의 전파 수신 강도(RSSI)는 안전을 위해 매우 중요 합니다.
RSSI 채널 매핑 방법
- QGroundControl(QGC)에서 파라미터 설정 열기 QGC를 실행한 후, 상단 메뉴에서 “Parameters”를 선택하여 파라미터 설정 화면으로 이동합니다.
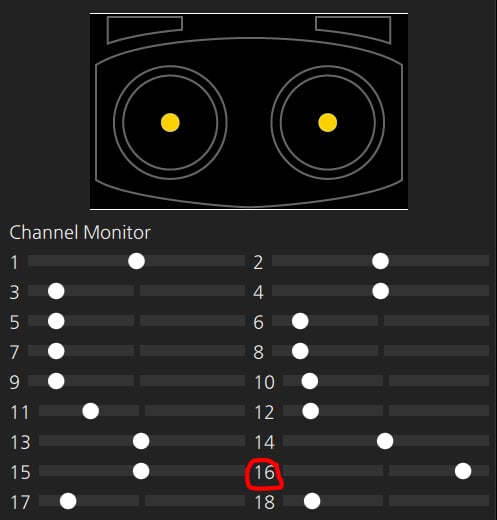
RC_RSSI_PWM_CHAN파라미터 찾기 검색창에RC_RSSI_PWM_CHAN을 입력하여 해당 파라미터를 찾습니다.- 16번 채널로 설정
RC_RSSI_PWM_CHAN의 값을16으로 설정합니다. 이렇게 하면 16번 채널의 PWM 입력이 RSSI로 인식됩니다. - RSSI 범위 설정 (선택 사항) 필요에 따라
RC_RSSI_PWM_MIN및RC_RSSI_PWM_MAX파라미터를 조정하여 RSSI의 최소 및 최대 PWM 값을 설정할 수 있습니다. 기본값은 각각 1000과 2000입니다.
참고 사항
RC_MAP_RSSI파라미터 부재: PX4 1.15.4 버전에서는RC_MAP_RSSI파라미터가 존재하지 않으며, 대신RC_RSSI_PWM_CHAN을 사용합니다.- QGC에서 RSSI 확인: 설정 후, QGC의 “Widgets” > “Analyze” 또는 “Telemetry” 탭에서 RSSI 값을 실시간으로 확인할 수 있습니다.
- 수신기 설정 확인: 수신기가 16번 채널을 통해 RSSI 신호를 출력하도록 설정되어 있는지 확인해야 합니다.
이러한 설정을 통해 수신기의 16번 채널을 RSSI로 매핑하여 QGC에서 신호 강도를 모니터링할 수 있습니다. 추가적인 설정이나 문제가 발생할 경우, PX4 공식 문서나 커뮤니티 포럼을 참고하시기 바랍니다.



