오프보드 제어 펌웨어 설정
오프보드 개발을 시작하기 전에 펌웨어 측에서 설정해야 할 두 가지가 있습니다.
RC 스위치를 오프보드 모드 활성화에 매핑
이를 수행하려면 QGroundControl 에 매개변수를 로드 하고 오프보드 모드를 활성화하는 데 사용할 RC 채널을 할당할 수 있는 RC_MAP_OFFB_SW 매개변수를 찾으십시오. 오프보드 모드에서 벗어날 때 위치 제어로 들어가는 방식으로 사물을 매핑하는 것이 유용할 수 있습니다.
MAVLink 메시지를 사용하여 오프보드 모드를 활성화할 수 있으므로 이 단계는 필수는 아닙니다.
컴패니언 컴퓨터 인터페이스 활성화
컴패니언 컴퓨터에 연결하는 직렬 포트에서 MAVLink를 활성화하십시오( 컴패니언 컴퓨터 참조 ).
하드웨어 설정
일반적으로 오프보드 통신을 설정하는 방법에는 세 가지가 있습니다.
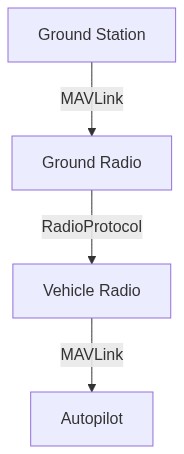
1. 직렬 라디오
- 하나는 자동 조종 장치의 UART 포트에 연결됩니다.
- 하나는 지상국 컴퓨터에 연결됨예시 라디오는 다음과 같습니다:
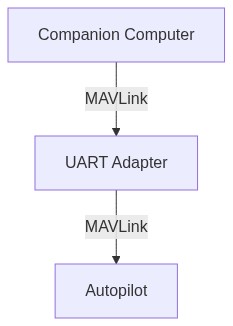
2. 온보드 프로세서
UART-USB 어댑터를 통해 자동 조종 장치에 연결된 차량에 장착된 소형 컴퓨터입니다. 여기에는 많은 가능성이 있으며 자동 조종 장치에 명령을 보내는 것 외에 수행하려는 추가 온보드 처리 종류에 따라 달라집니다.
소형 저전력 예:
더 큰 고전력 예:
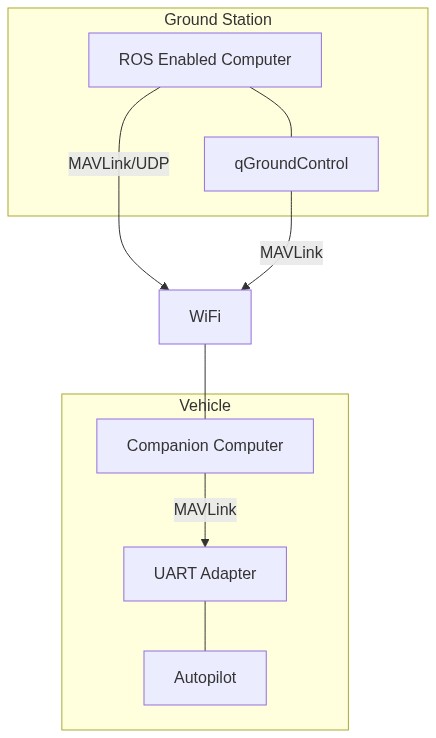
3. 온보드 프로세서 및 ROS에 대한 Wi-Fi 링크(권장 )
차량에 장착된 소형 컴퓨터는 UART-USB 어댑터를 통해 자동 조종 장치에 연결되는 동시에 ROS를 실행하는 지상국에 대한 WiFi 링크도 갖추고 있습니다. 이는 WiFi 어댑터와 결합된 위 섹션의 컴퓨터 중 하나일 수 있습니다.