
지상국(GCS)은 일반적으로 무선 원격 측정을 통해 UAV와 통신하는 지상 기반 컴퓨터에서 실행되는 소프트웨어 애플리케이션입니다 . UAV의 성능과 위치에 대한 실시간 데이터를 표시하고 “가상 조종석” 역할을 할 수 있어 실제 비행기를 조종하는 경우와 동일한 여러 계기를 보여줍니다. GCS는 비행 중인 UAV를 제어하고 새로운 임무 명령을 업로드하고 매개변수를 설정하는 데에도 사용할 수 있습니다. 또한 UAV 카메라의 라이브 비디오 스트림을 모니터링하는 데 자주 사용됩니다.
특정 GCS를 선택하는 결정은 종종 차량과 선호하는 컴퓨팅 플랫폼에 따라 다릅니다.
- 바로 비행이 필요한 사용자는 Tower (Droid Planner 3) 또는 태블릿이나 휴대폰에서 실행되는 다른 GCS 의 휴대성과 사용 편의성을 선호할 수 있습니다 .
- DIY/Kit 사용자와 개발자는 구성 및 분석 도구에 액세스해야 하는 경우가 많으므로 (적어도 처음에는) Mission Planner , APM Planner 2 또는 더 완전한 기능을 갖춘 다른 GCS가 필요합니다.
데스크탑용 GCS 비교
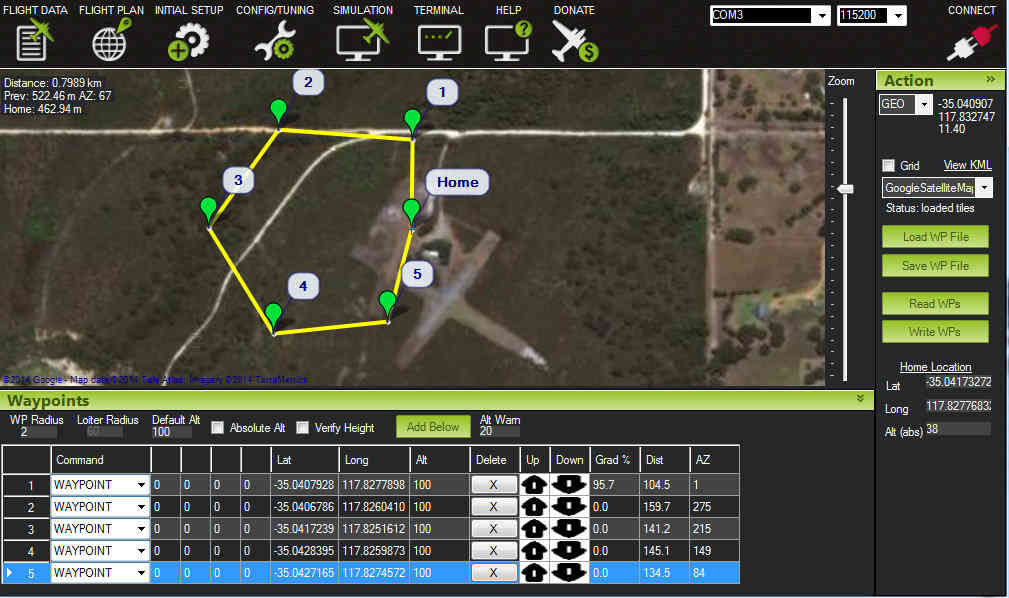
미션 플래너
ArduPilot에 완전한 기능을 갖추고 널리 사용되는 GCS.
- 플랫폼 : Windows, Mac OS X (Mono 사용)
- 라이선스 : 오픈 소스 (GPLv3)
QGroundControl
QGroundControl은 PX4 재단에서 만든 PX4에 최적화 된 지상국으로 ArduPilot을 지원하며, MAVLink 지원 자동 조종 장치와 함께 작동합니다. 데스크톱 및 리눅스, 모바일의 모든 플랫폼에서 실행되는 GCS 제품 중에서 고유한 어플리케이션 입니다.
- 플랫폼 : 윈도우, 맥 OS X, 리눅스, 안드로이드, iOS
- 라이선스 : 오픈 소스 (GPLv3)




