

quad-compsd-orin-nano-3.0.0 포함 소프트웨어
- NVIDIA Jetpack 6.2 – New!!!
- Ubuntu 22.04.5 LTS, Kernel 5.15.148-tegra
- ROS2 Humble
- CUDA (12.6.68)
- cuDNN (9.3.0.75)
- TensorRT (10.3.0.30)
- VPI (3.2.4)
- OpenCV (4.11.0) –CUDA 빌드!!!
- Jtop
- terminator Terminal
- MAVSDK C++ (3.8) – New!!!
- MAVSDK-Python (3.8) – Upgrade!!!
- MAVROS ROS2 Humble 버전
- PX4 uORB ROS2 Library (px4_ros_com, px4_msg)
- PX4 ROS2 DDS Agent (Micro XRCE-DDS Agent – v3.0.1)
- 쿼드(QUAD) 드론연구소 PX4 OFFBOARD 코드 샘플
SD카드 제작시 56GB로 할당되어 있으나 GParted 소프트웨어를 이용하여 SD카드 용량에 최대치까지 확장하여 사용할 수 있습니다.
GParted 설치(
$ sudo apt-get install gparted)

계정 로그인
- ID: quad
- Password: quad1234
CUDA
CUDA 12.6.85 사용을 위한 환경 변수는 .bashrc 파일에 설정되어 있습니다.
export CUDA_HOME=/usr/local/cuda
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda/lib64:/usr/local/cuda/extras/CUPTI
export PATH=/usr/local/cuda/bin${PATH:+:${PATH}}ROS 2
ROS2 Humble 버전이 설치되어 있습니다.
변경은 ~/.bashrc 파일에 ROS 환경변수의 주석(#) 처리를 변경하여 설정할 수 있습니다.
###ROS2 Env.
source /opt/ros/humble/setup.bash
source /usr/share/colcon_cd/function/colcon_cd.sh
export _colcon_cd_root=/opt/ros/humble/
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash
source ~/ros2_ws/install/setup.bash
alias cb='colcon build --symlink-install'
alias cbp="colcon build --symlink-install --packages-select"
alias cbe="colcon build --symlink-install --event-handlers console_direct+"
alias cbv="colcon build --symlink-install --verbose"
#ROS_DOMAIN_ID=111 #Set your unique IDMAVROS
MAVROS는 ROS 2 Humble 버전이 설치되어 있으며 사용하는 ROS 환경에 따라 자동으로 설정 됩니다.
ROS 2 Humble MAVROS
quad@orin-nano:~$ apt list --installed | grep mavros
ros-humble-mavros-extras/jammy,now 2.9.0-1jammy.20241128.095159 arm64 [installed]
ros-humble-mavros-msgs/jammy,now 2.9.0-1jammy.20241128.024938 arm64 [installed]
ros-humble-mavros/jammy,now 2.9.0-1jammy.20241128.092210 arm64 [installed]ROS2 MAVROS 실행
jetson@orin-nano:~/$ ros2 launch mavros px4.launchROS2 PX4 uORB
~/ros2_ws/src ROS2 작업공간에 설치되어 있습니다.
quad@orin-nano:~/ros2_ws/src$ ls -l
total 16
drwxrwxr-x 9 jetson jetson 4096 aug 10 08:30 mavros
drwxrwxr-x 6 jetson jetson 4096 aug 10 11:08 offb_mavros_py
drwxrwxr-x 6 jetson jetson 4096 aug 10 15:26 px4_msgs
drwxrwxr-x 11 jetson jetson 4096 aug 10 15:27 px4_ros_com자세한 내용은 쿼드(QUAD) 온라인 교육 교재를 참고 하시기 바랍니다.
MAVSDK-Python
quad@orin-nano:~$ pip show mavsdk
Name: mavsdk
Version: 3.8.0
Summary: Python wrapper for MAVSDK
Home-page: https://github.com/mavlink/MAVSDK-Python
Author:
Author-email:
License:
Location: /home/quad/MAVSDK-Python
Editable project location: /home/quad/MAVSDK-Python
Requires: aiogrpc, grpcio, protobuf
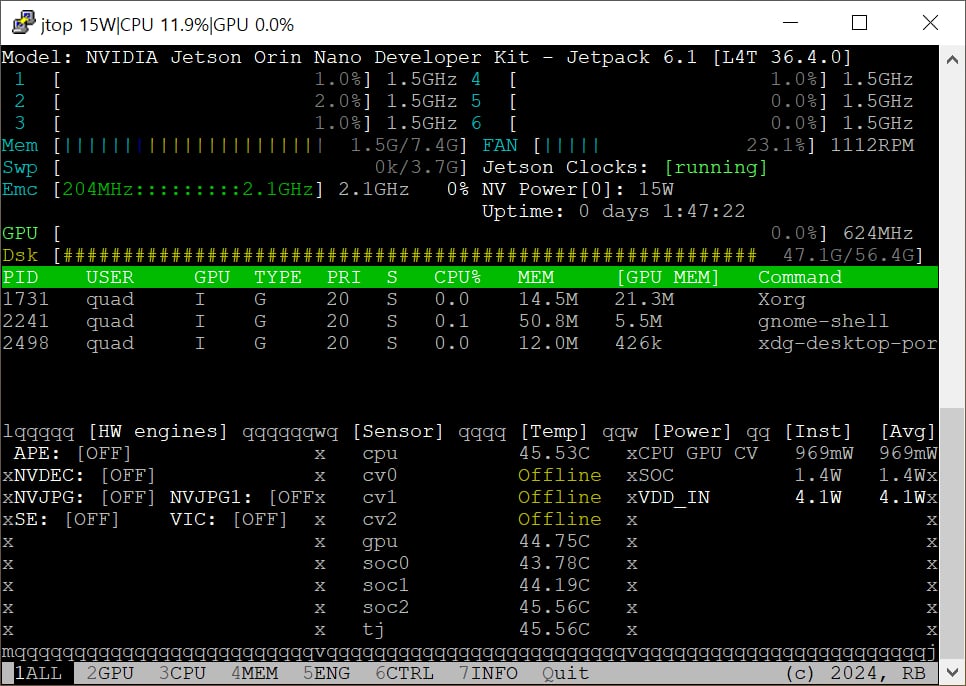
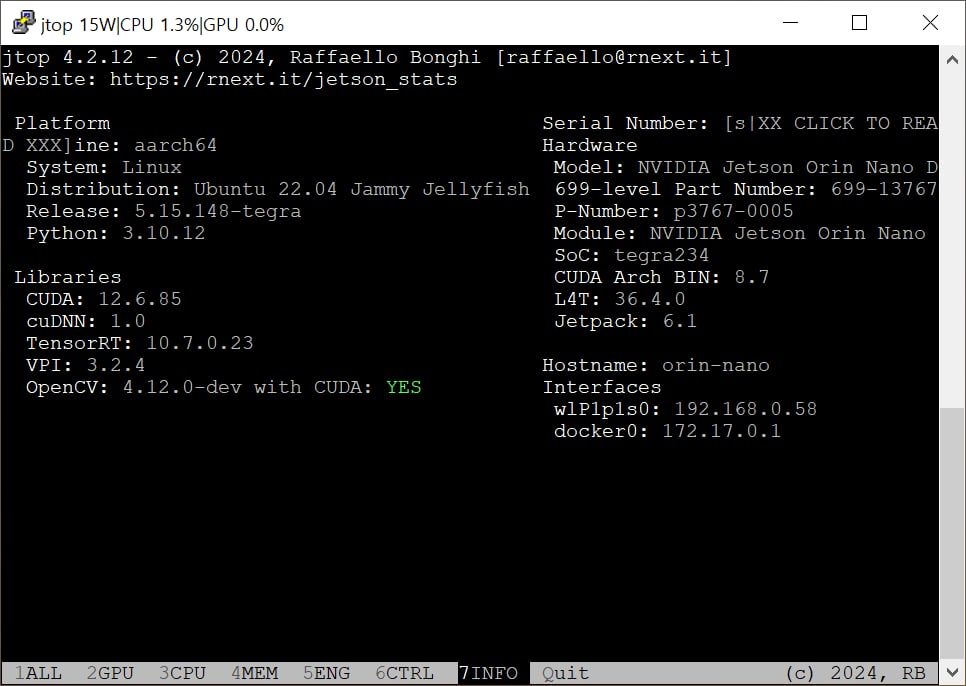
Required-by:jetson-stats
Jetson Nano 실행 모니터링 및 오버 클컥, 냉각 제어 등 다양한 기능을 사용하여 Jetson Nano를 보다 편리하게 사용할 수 있습니다.
OpenCV 4.11.0 (CUDA build version)
CUDA로 빌드된 OpenCV 4.12.0-dev 버전을 탑재하여 GPU를 사용하여 보다 고속의 영상처리를 수행할 수 있습니다.
OpenCV 버전 확인
quad@orin-nano:~/ros2_ws$ python3
Python 3.10.12 (main, Nov 6 2024, 20:22:13) [GCC 11.4.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
>>> cv2.__version__
'4.11.0-dev'
>>>[참고.1] I/O 디바이스에 대한 읽기/쓰기 권한 부여 방법
Jetson Orin의 USB나 GPIO를 통해 FC와 연결등 I/O 디바이스를 사용하고자 할때는 디바이스에 대한 읽기/쓰기 권한을 부여해야 어플리케이션에서 정상적으로 장치에 데이터를 R/W 할수 있습니다.
예: USB TTL 보드 to FC 연결시 /dev/ttyUSB0 파일 권한 체크 및 권한 부여. (dialout Group에 quad 유저 추가)
sudo usermod -aG dialout "$(id -un)"
[참고.2] Jetson Orin Nano 개발자 키트 펌웨어 업그레이드 가이드
Jetson Orin Nano 개발자 키트의 펌웨어 버전이 36.x 이하라면 펌웨어를 업그레이드 해야 합니다.
업그레이드 방법은 아래 링크를 참고 하시기 바랍니다.
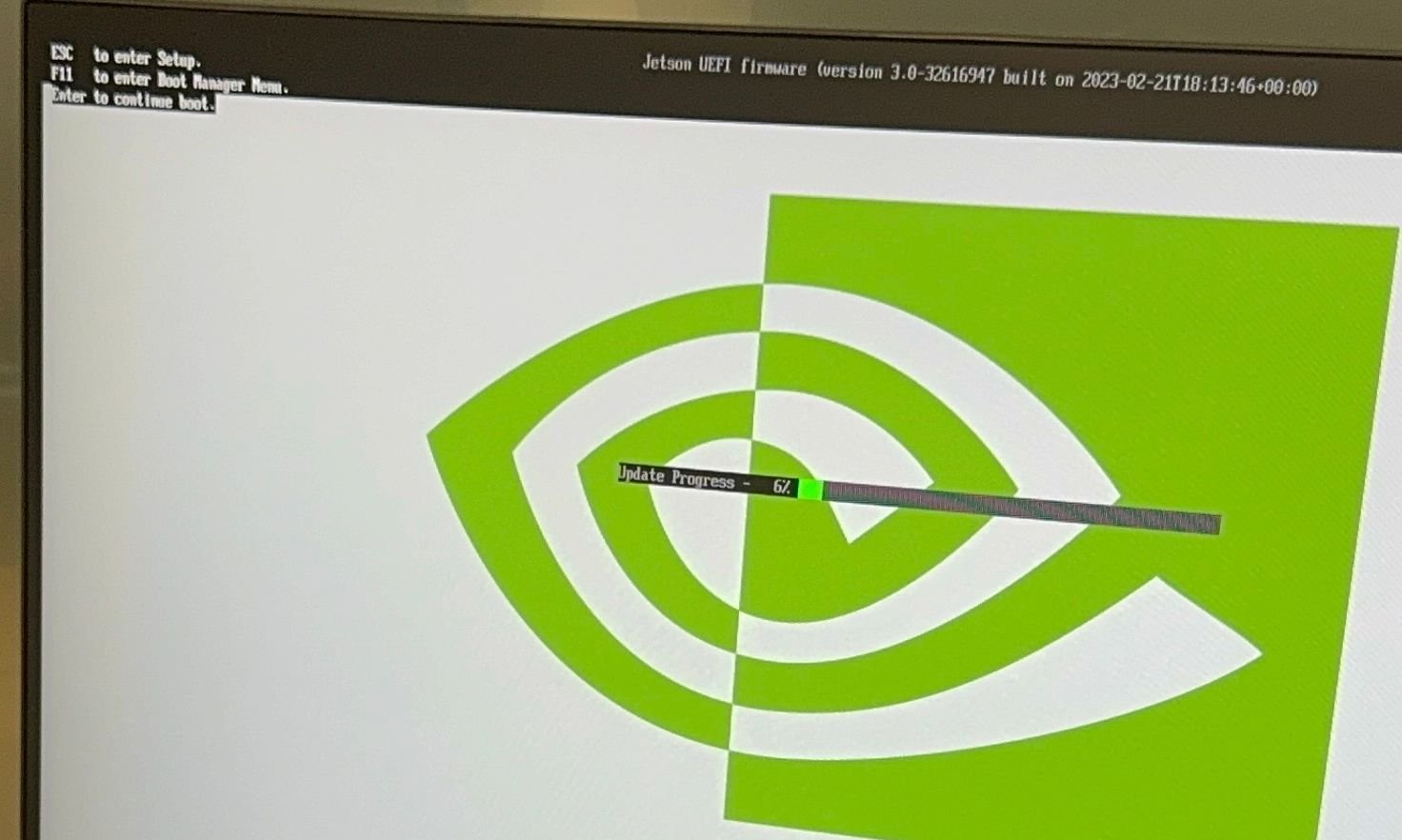
JetPack 6 Developer Guide – Upgrade Orin Nano Without a Linux Host
사용 문의
사용 문의 및 개선사항은 소프트웨어 정품 구입자를 위한 “쿼드(QUAD) 드론연구소 공식 카페”를 통해 문의 해 주시면 감사하겠습니다.
https://cafe.naver.com/maponarooo
라이센스(License)
- 개인용
- 회사나 학교 등 멀티유저용
- 문의처 : (031)-680-1311
- 한국저작권위원회 컴퓨터프로그램 저작물 저작권 등록번호 : C2024-029034

소프트웨어 라이센스문의 및 구매
소프트웨어 이미지 라이센스 구매 관련 문의는 아래 링크를 통해 가능합니다.
쿼드(QUAD) Tel. (031)-680-1311



