
제품 라인업(Line-up)
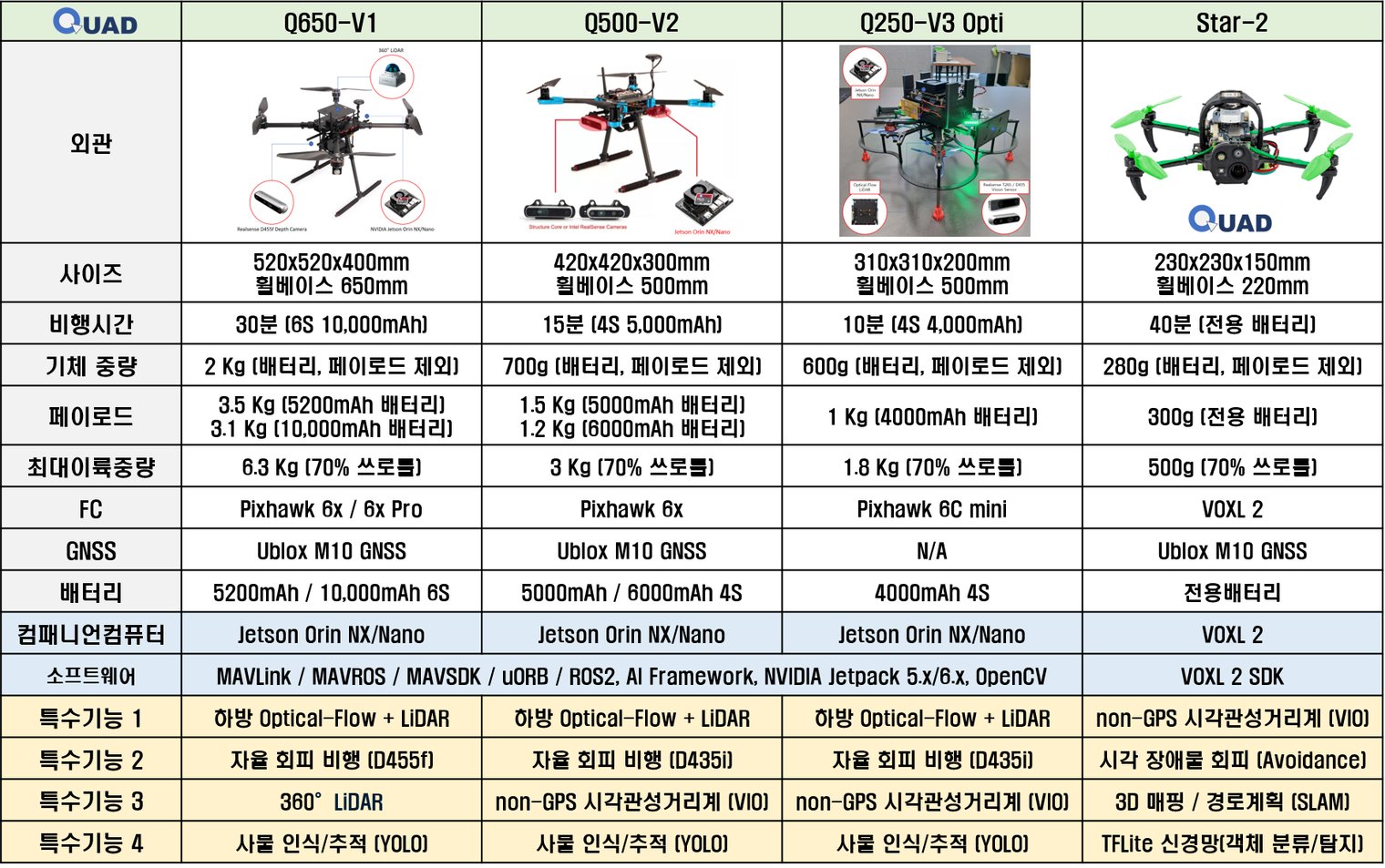
쿼드(QUAD) 자율주행드론(키트)는 널리 사용되는 오픈 소스 구성 요소와 작업에 필요한 문서 및 라이브러리 세트로 구성된 프로그래밍 가능한 쿼드콥터 형태의 교육/연구용 개발 키트 입니다.
Q250-V3 Opti, Q500-V2, Q650-V1 교육/연구용 드론 키트
제품 브로셔(한글)
https://drive.google.com/file/d/13vw46TAoeS7V5XMrqMhBHVtbQGUZPc-S/view?usp=drive_link
Product Brochure(English):
https://drive.google.com/file/d/1P65hAdHzAKi8OKljMy6ms6cB4tsrmDdN/view?usp=drive_link
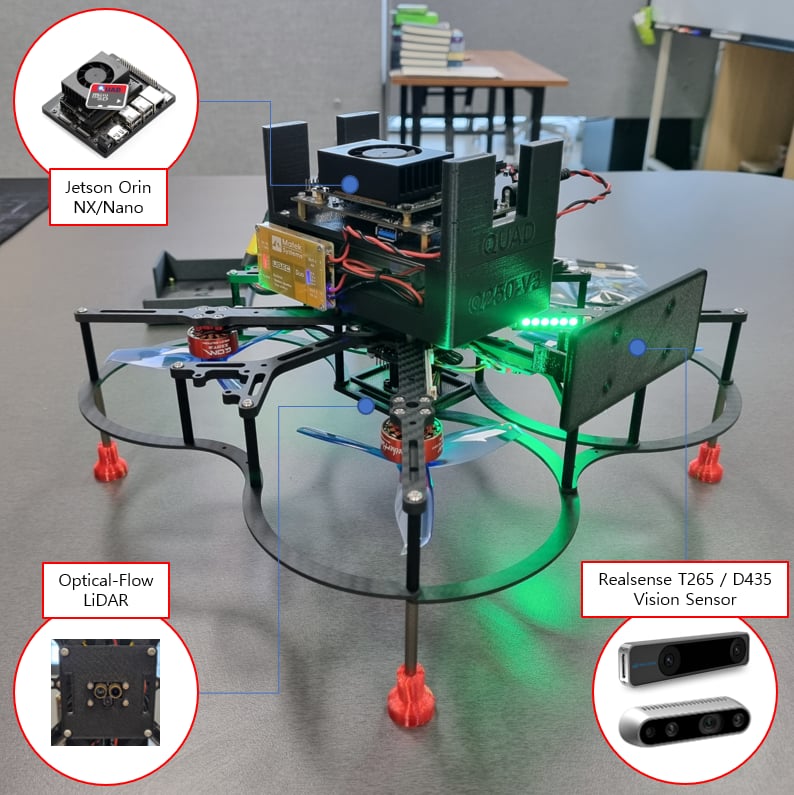
Q250-V3 Opti non-GPS 자율주행드론
Q250-V3 Opti 구매링크
https://smartstore.naver.com/maponarooo/products/10214914472
Q500-V2 자율주행드론

구매링크:
https://smartstore.naver.com/maponarooo/products/9227908929
Q650-V1 자율주행 드론

구매링크:
https://smartstore.naver.com/maponarooo/products/11375524750
Star-2 SLAM 자율주행 드론 키트 (수입)


구매 링크:
https://smartstore.naver.com/maponarooo/products/11533931217
본 키트에는 PX4 비행 스택이 있는 비행 컨트롤러, 온보드 컴퓨터를 제어하는 Jetson Orin, 컴퓨터 비전을 사용하여 비행을 수행하기 위한 카메라 모듈, 인텔 Realsense T265 VIO 트래킹 카메라(단종)와 D435i 심도 카메라를 포함한 non-GPS 비전 카메라 및 사물인식 및 추적을 위한 AI 소프트웨어들이 옵션으로 포함 됩니다.
또한, Q250 AI 자율주행드론 플랫폼에는 주변 장치 작업 및 자율비행드론 프로그래밍에필요한 전체 소프트웨어 세트와 함께 Jetson Nano, Jetson Orin Nano, Raspberry Pi 용으로 사전 세팅된 SD카드 이미지 파일이 포함되어 있습니다.
문서를 검토했지만 질문에 대한 답변을 찾지 못한 경우 쿼드(QUAD) 드론연구소 공식 카페에 참여하면 전문가가 기꺼이 답변해 드리도록 하겠습니다. 우리는 또한 ArduPilot, PX4, 실내 자율 주행, 군집 드론을 코딩하는 프로그래머를 위한 네이버 카페도 운영 하고 있습니다.
쿼드 Q250-V3 자율주행 드론을 통해 신속하게 자율주행 드론을 개발하고 드론 캡스톤 경진대회를 통해 자신의 능력을 널리 알리는 멋지고 즐거운 여정이 되시길 바랍니다.
제품 개발 지원 YouTube 채널
제품지원 구글 드라이브
쿼드 드론에 대한 세팅 메뉴얼과 펌웨어 및 파라메터 파일들은 구글 드라이브에 지속적으로 업데이트 하고 있어 개발자 여러분들의 빠른 개발을 도와 드립니다.
Q250 제품 지원 드라이브
https://drive.google.com/drive/folders/1hgB7gZP6d_Y3ZOY6QkMl3p-1tz_pg_Ph?usp=drive_link
Q500 제품 지원 드라이브
https://drive.google.com/drive/folders/1Zs4nM7zCteHJbaMIxNJvtIhTqVTIR3pl?usp=drive_link



