BLHeli 펌웨어 및 구성 애플리케이션은 ESC 구성을 허용하고 추가 기능을 제공하도록 개발되었습니다. 이 펌웨어가 포함된 ESC를 사용하면 타이밍, 모터 방향, LED, 모터 드라이브 주파수 등을 구성할 수 있습니다. BLHeli를 사용하기 전에 DShot 설정 지침을 따르십시오 .
이 페이지에는 다음 기능에 대한 설정 지침이 포함되어 있습니다.
- Pass-Through 지원을 통해 BLHeli 애플리케이션을 사용하여 자동 조종 장치에 연결된 상태를 유지하면서 ESC를 구성할 수 있습니다.
- 뒤집을 수 있는 DShot (일명 3D 모드)을 사용하면 모터가 어느 방향으로든 회전할 수 있습니다.
- 양방향 DShot을 사용하면 추가 원격 측정 연결 없이도 ESC가 RPM을 자동 조종 장치로 다시 보낼 수 있습니다.
- ESC 원격 측정을 통해 ESC는 RPM, 전압 및 전류 정보를 다시 자동 조종 장치로 보내서 기록하거나 실시간으로 보거나 배터리 모니터를 제거할 수 있습니다 .
“BLHeli”는 ESC 펌웨어 및 함께 제공되는 구성 소프트웨어를 제공하는 여러(때로는 경쟁하는) 프로젝트를 다룹니다.
- BLHeli는 더 이상 유지 관리되지 않으며 최신 ESC에서 사용할 수 없는 원래 오픈 소스 소프트웨어였습니다.
- BLHeli32 는 비공개 소스이며 32비트 ARM MCU를 기반으로 합니다. 모든 최신 BLHeli ESC는 BLHeli32를 사용합니다.
- BLHeli_S 는 오픈 소스이며 16비트입니다. 이것은 더 이상 적극적으로 유지되지 않지만 마지막으로 게시된 버전인 16.7은 공장에서 배송될 때 “BLHeli_S” ESC에 기본적으로 설치됩니다.
- BLHeli_S JESC 는 유료 폐쇄 소스 소프트웨어이며 16비트로 로우엔드 하드웨어에서 실행할 수 있습니다.
- BLHeli_S BlueJay 는 무료 오픈 소스 소프트웨어이며 16비트입니다.
Pass-Through 지원
PX4는 Pass-Through 방식을 지원하지 않습니다.
Pass-Through 기능을 사용하면 BLHeli32 및 BLHeli_S ESC를 업그레이드하고 해당 BLHeliSuite32 또는 BLHeliSuite 애플리케이션(사용자 PC에서 실행)을 사용하여 구성할 수 있으며 ESC는 자동 조종 장치에 연결된 상태를 유지합니다. 이 기능을 사용하려면 다음 단계를 따르십시오.
- PC에 BLHeliSuite32 (BLHeli32 ESC용), BLHeliSuite (BLHeli_S ESC용) 또는 JESC 구성기 (BLHeli_S JESC용)를 다운로드하고 설치합니다.
- USB 케이블을 사용하여 PC를 자동 조종 장치에 연결한 다음 지상국(예: Mission Planner, QGC)에 연결합니다.
- SERVO_BLH_AUTO를 1로 설정하면 멀티콥터 및 쿼드플레인 또는 스로틀(예: SERVOx_FUNCTION이 70(“스로틀”)으로 설정된 출력)에 대해 모터로 구성된 모든 출력(예: SERVOx_FUNCTION = “Motor1”, “Motor2” 등) 에서 패스스루를 자동으로 활성화합니다 . 73(“스로틀 왼쪽”) 또는 74(“스로틀 오른쪽”)). 대부분의 멀티콥터, 쿼드플레인 및 로버의 경우 이것이 올바른 작업을 수행하지만 평면의 경우 SERVO_BLH_MASK를 설정하여 적절한 서보 출력에서 패스스루를 활성화합니다.
- PC가 위에서 권장한 대로 USB 케이블을 사용하는 대신 원격 측정 라디오를 사용하여 자동 조종 장치에 연결된 경우 SERVO_BLH_PORT를 원격 측정 라디오에 연결된 자동 조종 장치 포트로 설정합니다. 이것은 자동 조종 장치에 대한 ESC 원격 측정 피드백에 사용되는 포트를 지정하지 않는다는 점에 유의하십시오!
- 안전 스위치를 사용하는 경우 눌러야 합니다(또는 BRD_SAFETY_DEFLT = 0으로 설정하여 비활성화). (
BRD_SAFETYENABLE이전 펌웨어 버전에서) - 지상국을 분리합니다(단, USB 케이블은 연결된 상태로 둡니다).
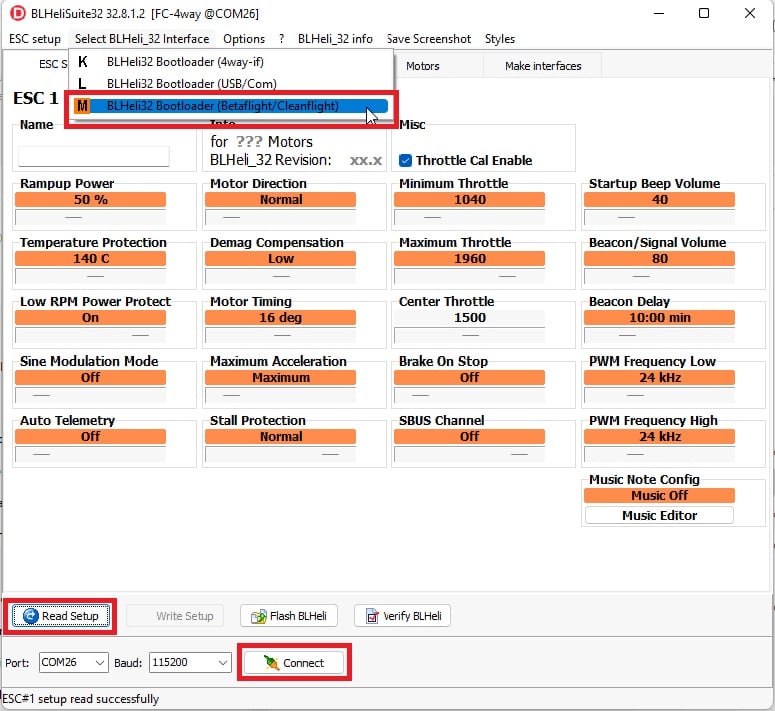
- ESC 구성 소프트웨어를 시작하고 인터페이스 메뉴에서 “BLHeli32 Bootloader(Betaflight/Cleanflight)”를 선택하여 자동 조종 장치의 COM 포트에 연결합니다. “연결” 및 “설정 읽기”를 누릅니다. 연결된 모든 ESC를 업그레이드하고 구성할 수 있어야 합니다.
메모
ArduPilot 펌웨어는 최신 BLHeli32 펌웨어와 BLHeliSuite32 또는 BLHeli_S 펌웨어와 BLHeliSuite만 있는 통과 프로토콜을 지원합니다.
경고
패스스루가 작동하려면 DShot 프로토콜 중 하나를 사용하도록 자동 조종 장치를 구성해야 합니다. 결국 ESC가 지원하는 다른 프로토콜(예: PWM, OneShot125) 중 하나를 사용하려는 경우 여전히 Pass-Through를 사용하여 ESC를 구성할 수 있습니다(예: 모터 방향 변경, 최소/최대 값 설정 등). -DShot을 사용 하지 않도록 자동 조종 장치를 구성합니다 . 자동 조종 장치와 ESC가 재부팅되면 ESC는 ESC가 더 이상 DShot을 사용하지 않는다는 것을 자동 감지해야 합니다.
Reverse Motor Direction – DShot ESC
뒤집을 수 있는 DShot(일명 3D 모드)을 사용하면 모터가 어느 방향으로든 회전할 수 있습니다. 이는 로버, 보트 및 역 추력이 있는 비행기 에 중요합니다 .
현재 BLHeli32 및 BLHeli_S 가능 리버서블 DShot ESC만 지원됩니다. 하나를 사용하려면 이를 구동하는 출력을 SERVO_BLH_3DMASK 비트마스크 매개변수에서 적절한 비트로 지정해야 합니다. 이는 출력 1000-1500-2000 값을 ESC의 올바른 디지털 값으로 매핑하여 각각 FullReverse-Idle-FullForward 범위 작동을 제공합니다.
DShot 명령이 활성화된 경우 ArduPilot은 시작 시 SERVO_BLH_3DMASK에 따라 ESC를 가역 모드(3D 모드)로 자동 구성 합니다 . DShot 명령을 활성화하면 DShot 설정 지침 에서 설명한 DShot 마스크 매개변수에 의해 DShot으로 구성된 다른 ESC로 다른 DShot 명령을 보낼 수 있습니다 .
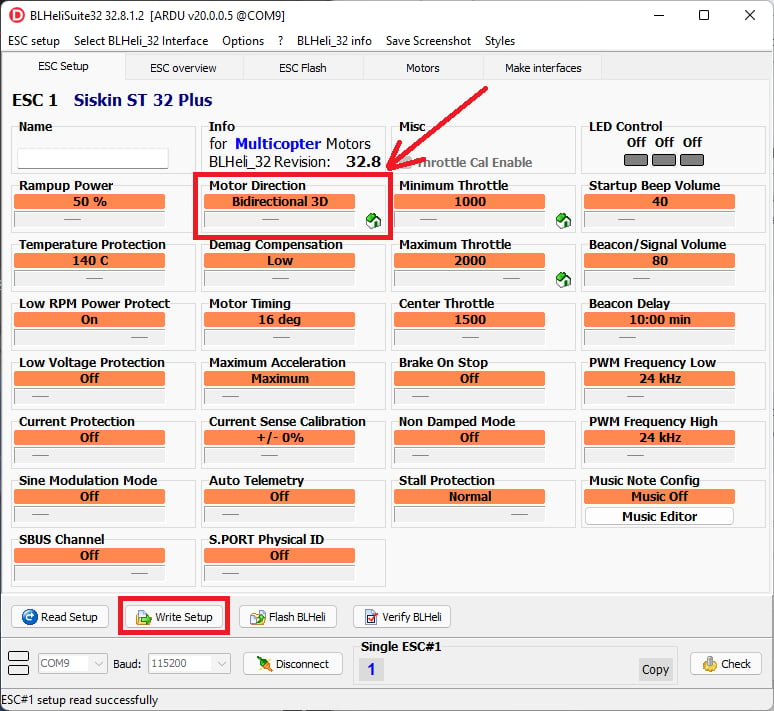
그렇지 않으면 아래와 같이 ESC의 “모터 방향”을 “양방향 3D”로 수동 구성해야 합니다.
메모
현재 ArduPilot은 Copter가 아닌 Plane 및 Rover용 리버서블 ESC 사용만 지원합니다.
ESC 텔레메트리
ESC에 이 기능이 있으면 이전에 추가 센서(예: 전원 모듈 및 RPM 센서)가 필요했던 성능 데이터를 모니터링하고 기록할 수 있습니다. 모든 ESC에서 제공하는 자세한 데이터를 통해 실시간 결정과 개별 ESC 또는 모터 성능 튜닝 및 고장 분석이 가능합니다. 주어진 ESC에는 원격 측정을 통해 전송된 특정 센서의 데이터가 있을 수도 있고 없을 수도 있습니다. 4 in 1 escs는 전압 및 전류 센서를 제공하지만 원격 측정을 통해 데이터를 전송하지 않고 자동 조종 장치에 직접 연결하는 것이 일반적입니다. 자세한 내용은 ESC 데이터 시트 및 연결 정보를 확인하십시오.
메모
ArduPilot은 현재 비 DShot 프로토콜의 신호 라인을 통해 스로틀 유휴 메시지를 통해 원격 측정 데이터에 대한 ESC 폴링을 지원하지 않습니다.
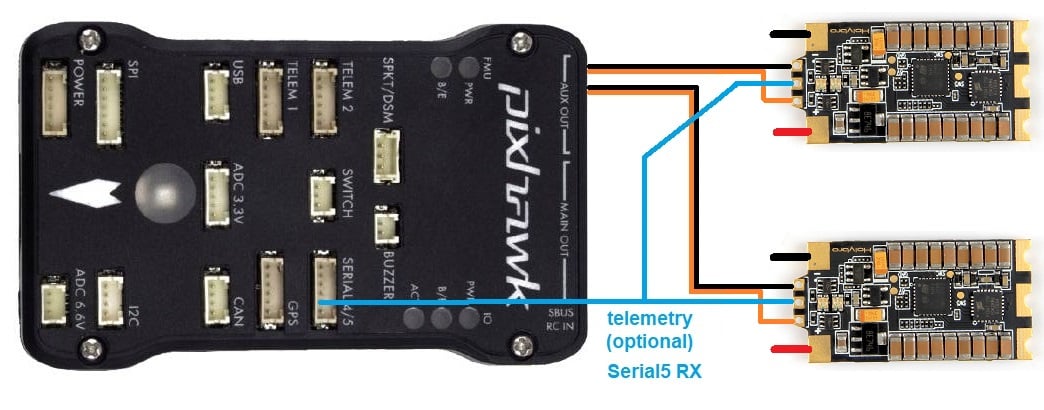
ESC 텔레메트리 와이어 연결