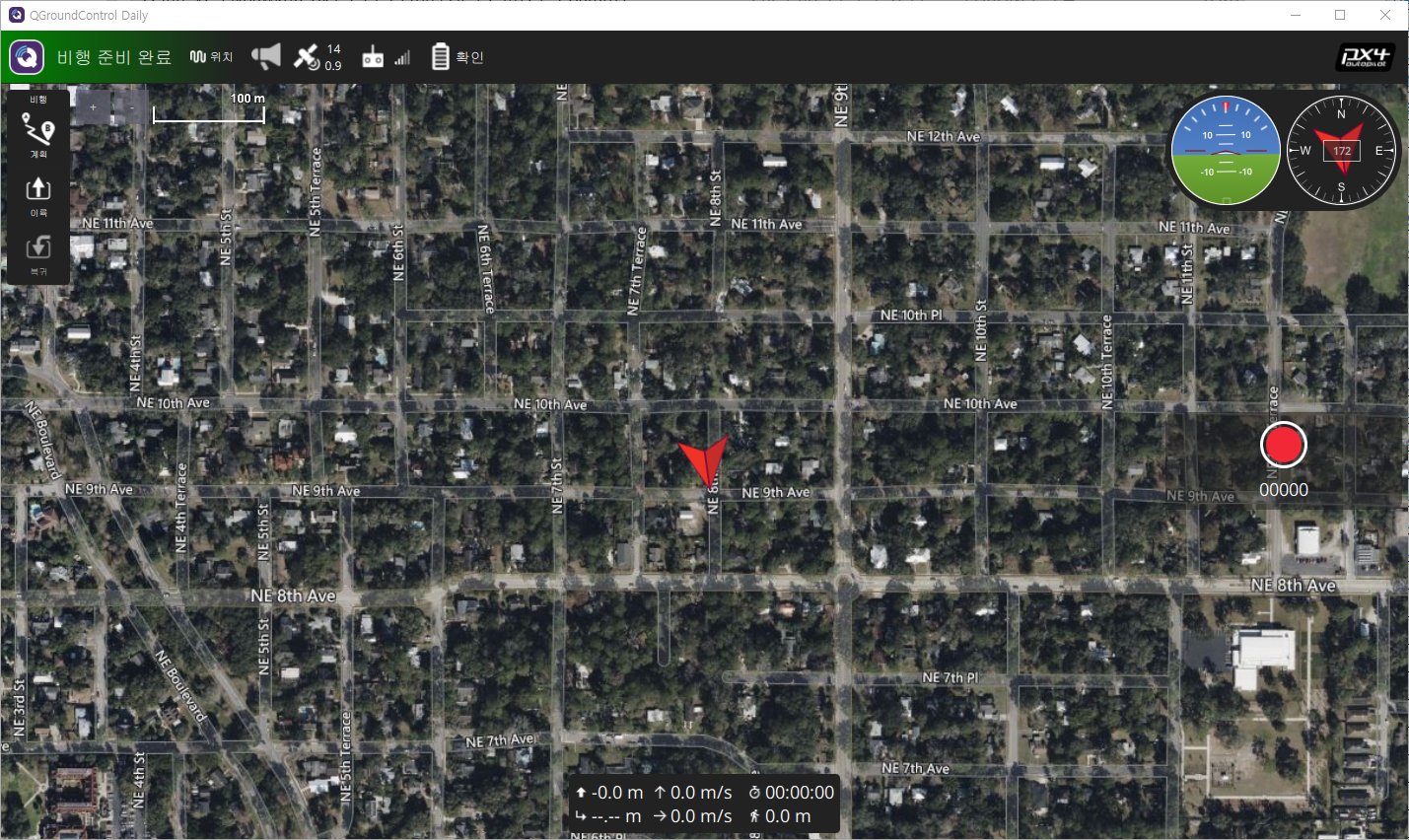
fake_gps는 non-GPS 모드에서 GPS의 역할을 가상으로 수행해 주어 지도상에 드론의 위치를 표시 합니다.
fake_gps는 일반 PX4 펌웨어에는 포함되지 않은 기능 입니다. 쿼드(QUAD)에서 제공하는 fake_gps가 포함된 펌웨어를 다운로드 받아 사용 하거나 사용자가 직접 빌드하여 사용 하여야 합니다. 빌드 방법은 아래 “fake_gps 빌드 방법” 섹션을 참고 하세요.
강좌 영상
fake_gps 실행
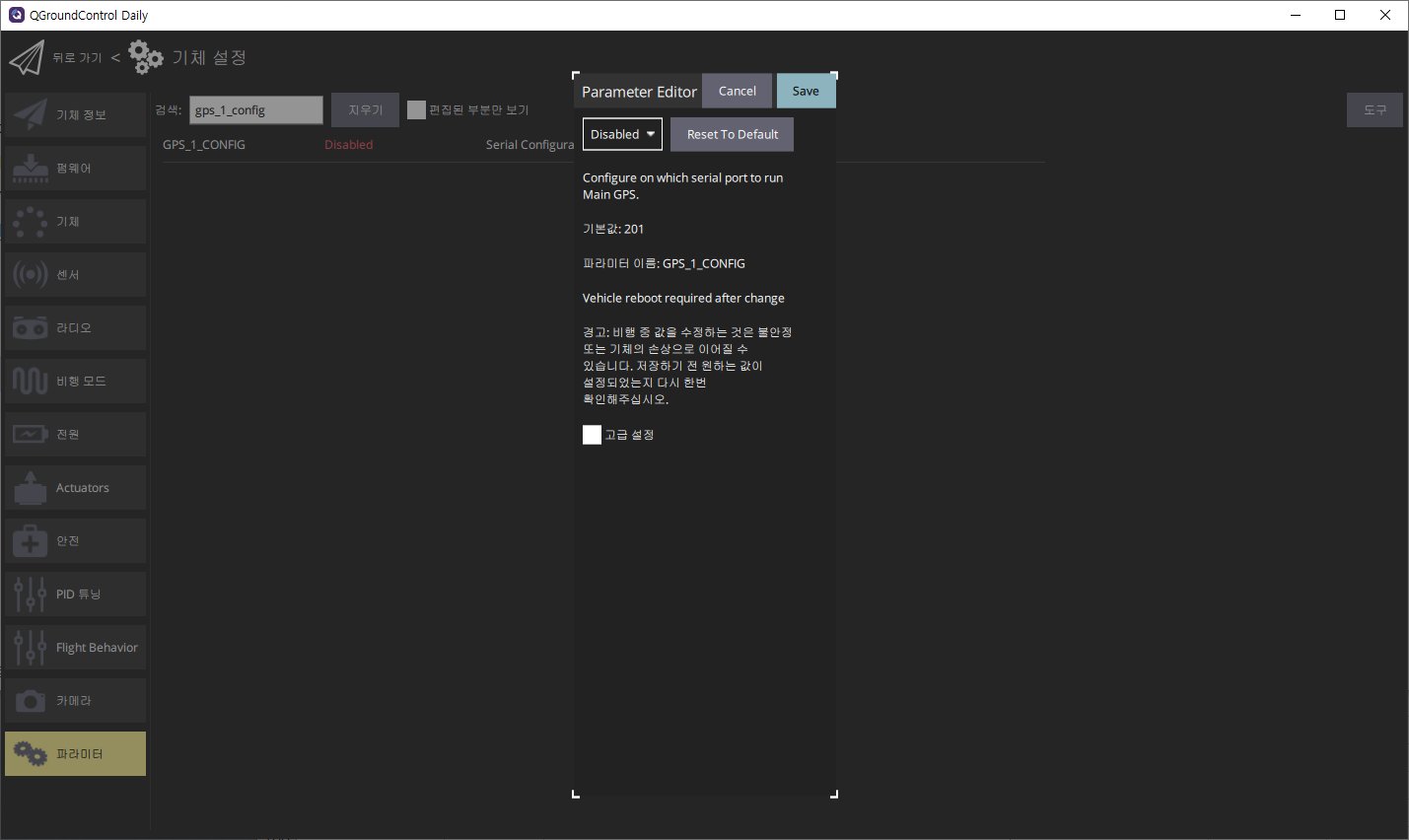
- GPS 파라메터 변경GPS_1_CONFIG = Disable 설정
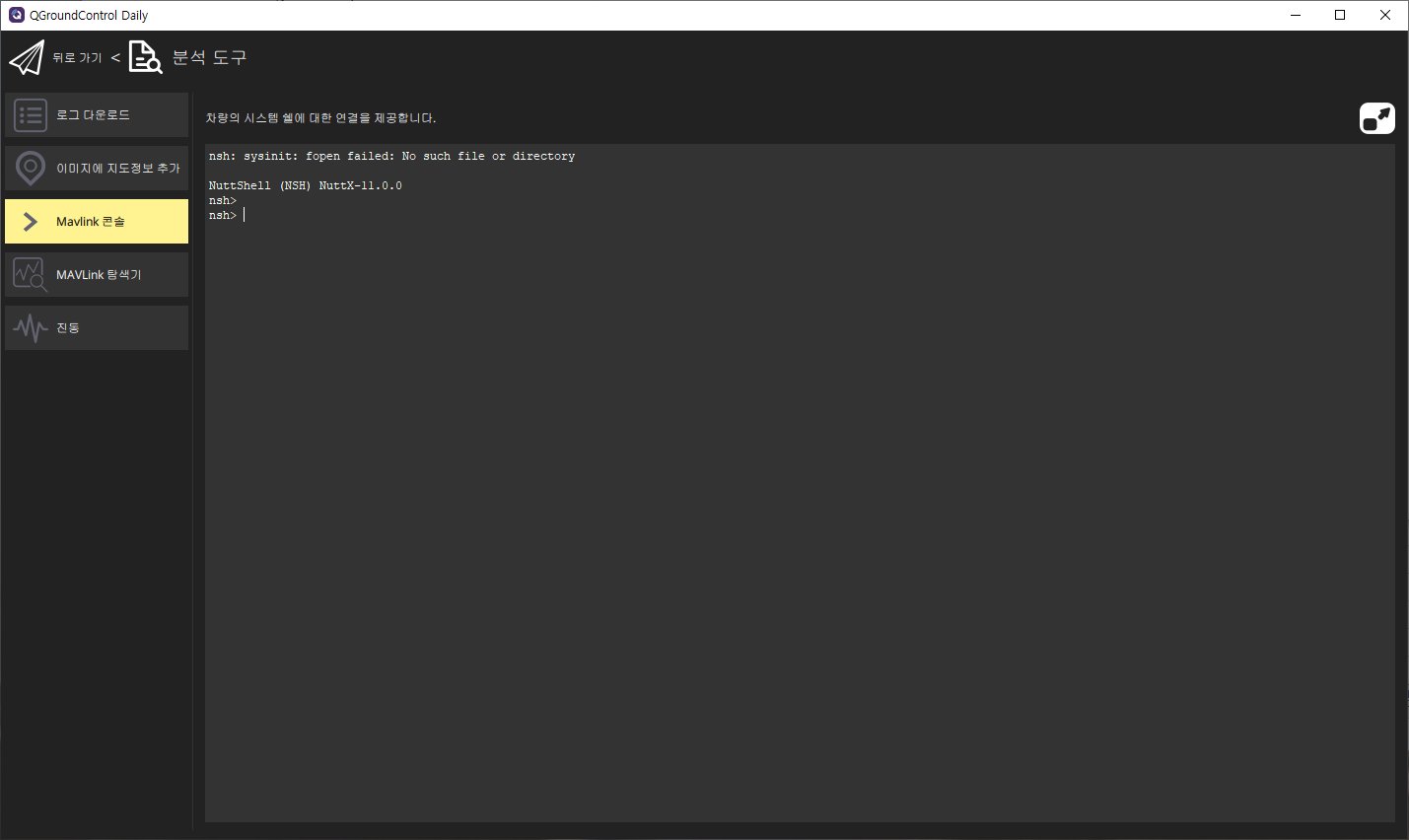
2. Mavlink 콘솔 메뉴로 들어 갑니다.
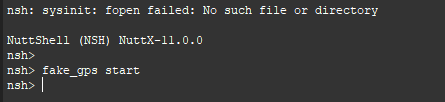
3. fake_gps 시작
4. 지도에 드론 위치 확인
fake_gps 펌웨어 빌드 방법
(1) Ubuntu PC에 PX4 Toolchain 다운 로드
cd
git clone -b v1.16.0 https://github.com/PX4/PX4-Autopilot.git --recursive
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
cd PX4-Autopilot
make px4_fmu-v6c_default boardconfig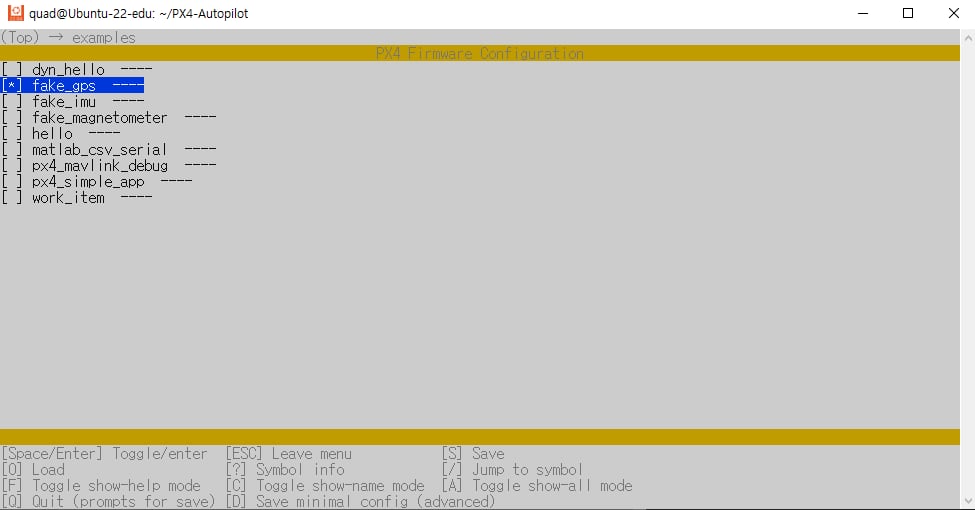
저장후 빠져 나옵니다.
(3) 펌웨어 빌드
make px4_fmu-v6c_default빌드가 완료되면 ~/PX4-Autopilot/build/px4_fmu-v6c_default/px4_fmu-v6c_default.px4 파일이 생성 됩니다.
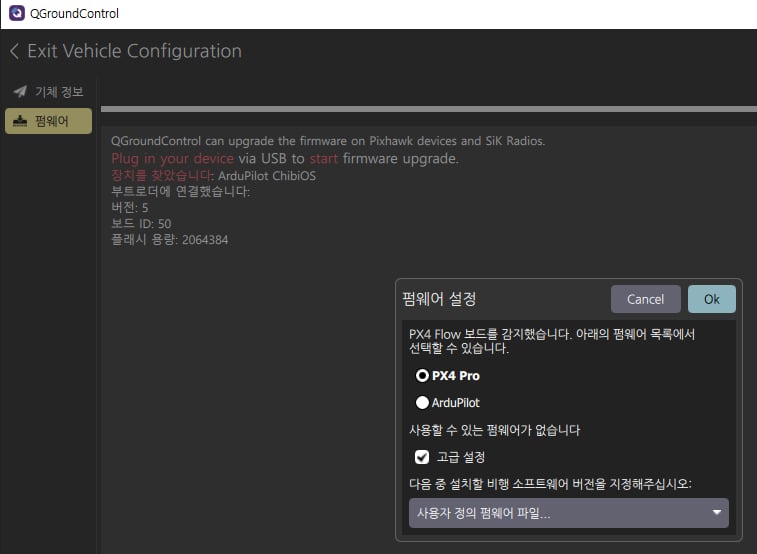
(4) 펌웨어 업데이트
QGroundControl을 이용하여 펌웨어 업데이트를 수행합니다.