쿼드(QUAD) 드론연구소
< 1 min read
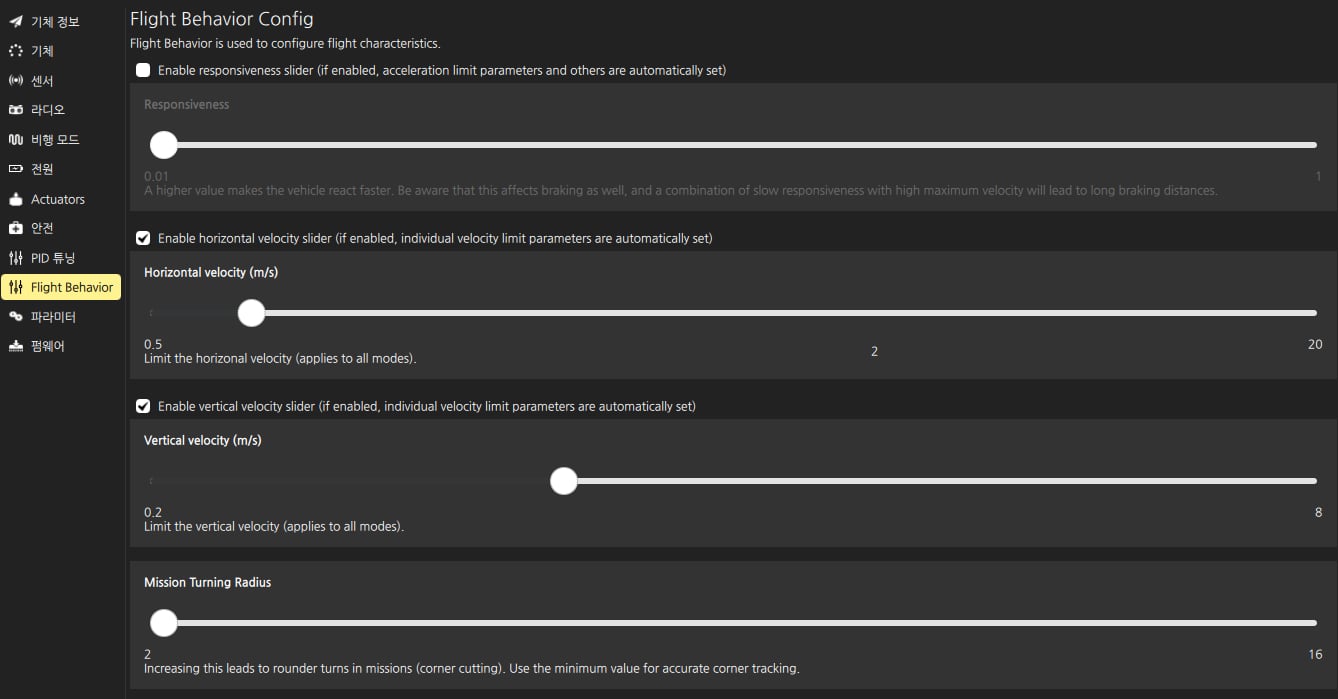
Flight Behavior는 조종기의 스틱 민감도와 기체의 이동 속도를 조절하는 기능 입니다.
안전을 위해 자율비행시 이동속도를 낮춰서 사용하는 것을 권장 합니다.
Vertical(상하) 이동속도를 2.5 이하로 낮추면 이륙이 잘 되지 않을 수 있으니 2.5 이상으로 설정하여 사용 하시기 바랍니다.
제공 BetterDocs
이메일 주소는 공개되지 않습니다. 필수 필드는 *로 표시됩니다
댓글 *
이름 *
이메일 *
웹사이트
다음 번 댓글 작성을 위해 이 브라우저에 이름, 이메일, 그리고 웹사이트를 저장합니다.