비행에 대한 플롯을 사용하여 일반적인 차량 상태를 분석할 수 있습니다.
플롯은 설명이 필요하지만 허용되는 범위와 플롯의 모양을 알기 위해서는 약간의 경험이 필요합니다. 이 페이지에서는 플롯을 해석하고 일반적인 문제를 식별하는 방법을 설명합니다.
일반 사용법
많은 플롯에 공통적인 특징:
- 플롯 배경색은 기록 중 비행 모드를 나타내는 데 사용됩니다(그래프는 모드에 따라 다름).
- 비행 모드: 플롯 본문의 배경색은 비행 모드를 나타냅니다. 플롯 위로 마우스를 가져가면 비행 모드 레이블이 표시됩니다.
- VTOL 비행 모드: VTOL 차량은 플롯 하단에 VTOL 모드를 배경색으로 추가로 표시합니다(멀티콥터는 파란색, 고정익은 노란색, 전환은 빨간색).

- 특정 플롯 축을 마우스로 스크롤하면 해당 축이 확대/축소됩니다(수평 또는 수직).
- 플롯 내부에서 마우스 스크롤을 하면 두 축이 모두 확대/축소됩니다.
PID 추적 성능
비행 모드에 따라 차량 컨트롤러는 위치, 속도, 고도 또는 속도 설정점을 추적하려고 시도할 수 있습니다(추적된 설정점은 모드에 따라 다릅니다. 예: 안정화 모드에는 속도 설정점이 없습니다).
예상 선(빨간색) 은 설정점 (녹색) 과 거의 일치해야 합니다 . 그렇지 않은 경우 대부분의 경우 해당 컨트롤러의 PID 게인을 조정해야 합니다.
Multicopter PID Tuning Guide에는 추적 성능 분석에 대한 예제 플롯과 정보가 포함되어 있습니다.
팁
특히 속도 컨트롤러의 경우 고속 로깅 프로필( SDLOG_PROFILE )을 활성화하면 확대 시 더 많은 세부 정보를 얻을 수 있어 유용합니다.
진동
진동은 멀티로터 차량의 가장 일반적인 문제 중 하나입니다. 진동 수준이 높으면 다음이 발생할 수 있습니다.
- 비행 효율성이 떨어지고 비행 시간이 단축됩니다.
- 모터가 뜨거워질 수 있습니다
- 재료 마모 증가
- 차량을 정밀하게 조정하지 못하여 비행 성능이 저하됩니다.
- 센서 클리핑
- 위치 추정 실패로 인해 잠재적으로 날아갈 수 있습니다.
따라서 진동 수준을 주시하고 필요한 경우 설정을 개선하는 것이 중요합니다.
진동 수준이 확실히 너무 높은 지점이 있으며 일반적으로 진동 수준이 낮을수록 좋습니다. 그러나 ‘모든 것이 괜찮다’와 ‘수준이 너무 높다’ 사이에는 넓은 범위가 있습니다. 이 범위는 차량 크기를 포함한 여러 요인에 따라 달라집니다. 대형 차량은 관성이 더 높기 때문에 더 많은 소프트웨어 필터링이 가능합니다(동시에 대형 차량의 진동은 더 낮은 주파수입니다).
다음 단락과 섹션에서는 진동 수준을 확인하는 데 사용할 플롯과 이를 분석하는 방법에 대한 정보를 제공합니다.
팁
진동을 분석할 때 여러 차트를 살펴보는 것이 좋습니다(다양한 차트가 일부 문제를 더 잘 강조할 수 있음).
액추에이터 제어 FFT
이 플롯을 보려면 고속 로깅 프로필( SDLOG_PROFILE )을 활성화해야 합니다.
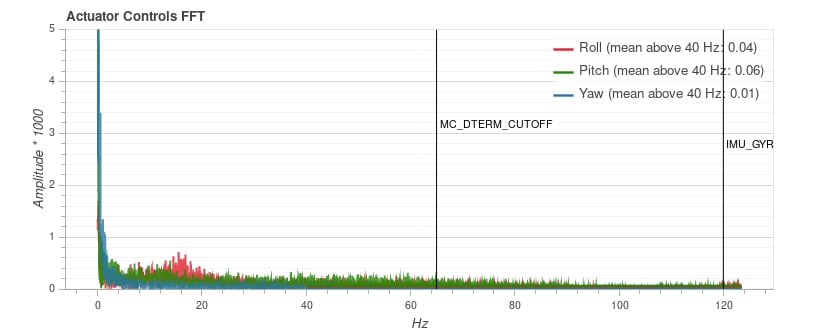
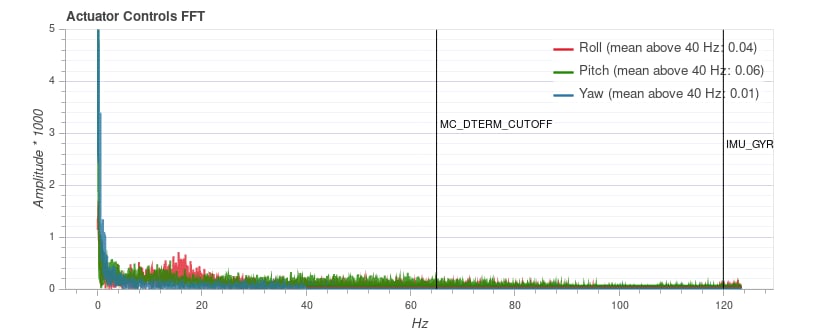
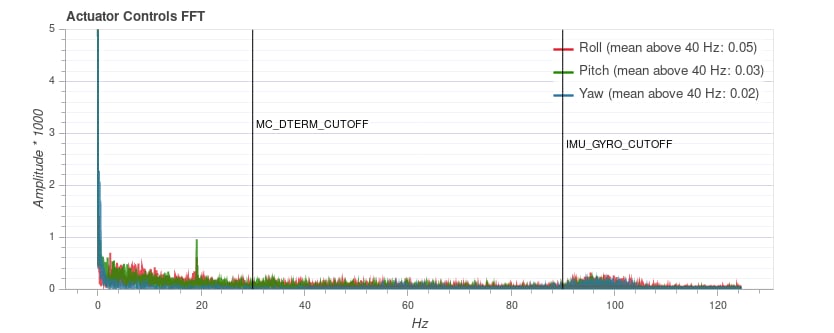
이 그래프는 액츄에이터 제어 신호(속도 컨트롤러의 PID 출력)를 기반으로 롤, 피치 및 요 축에 대한 주파수 플롯을 보여줍니다. 이는 주파수 피크를 식별하고 소프트웨어 필터를 구성하는 데 도움이 됩니다. 가장 낮은 끝(약 20Hz 미만)에는 단일 피크만 있어야 하며 나머지는 낮고 평평해야 합니다.
y축 스케일링은 차량마다 다르지만 동일한 차량의 로그를 서로 직접 비교할 수 있습니다.
예: 좋은 진동
QAV-R 5″ 레이서 프레임(진동 우수).
위 프레임의 탁월한 진동 특성은 소프트웨어 필터 의 차단 주파수를 상당히 높일 수 있음을 의미합니다 (제어 대기 시간 감소).
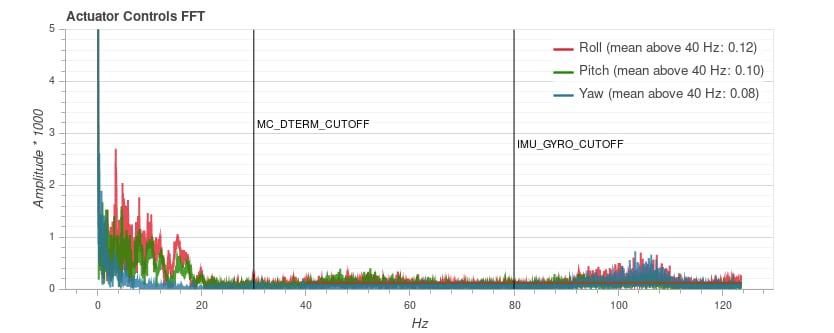
DJI F450 프레임(진동 양호).
S500 프레임:
메모
위의 플롯은 좋아 보이지만 동일한 비행에 대한 원시 가속도 그래프는 x와 y에 대한 진동 수준이 약간 높다는 것을 보여줍니다. 이는 여러 그래프를 확인해 볼 가치가 있는 이유를 보여주는 좋은 예입니다!
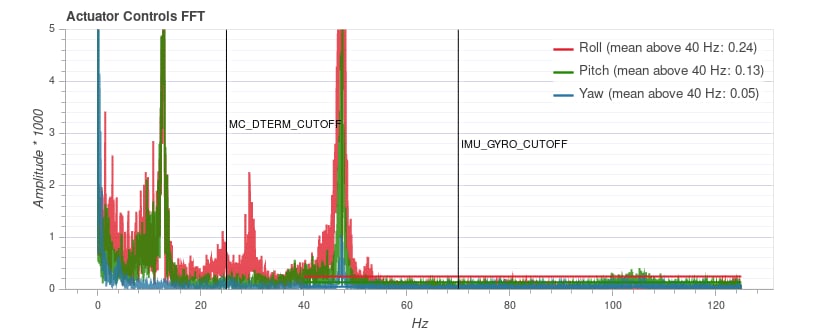
예: 나쁜 진동
이 예는 50Hz에 가까운 주파수의 피크를 보여줍니다(이 경우 “느슨한” 랜딩 기어로 인해).
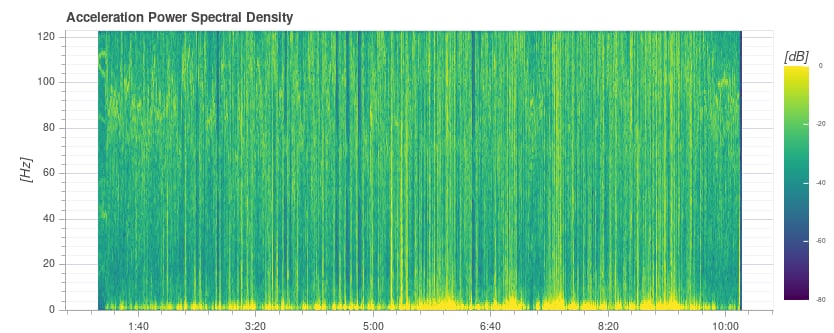
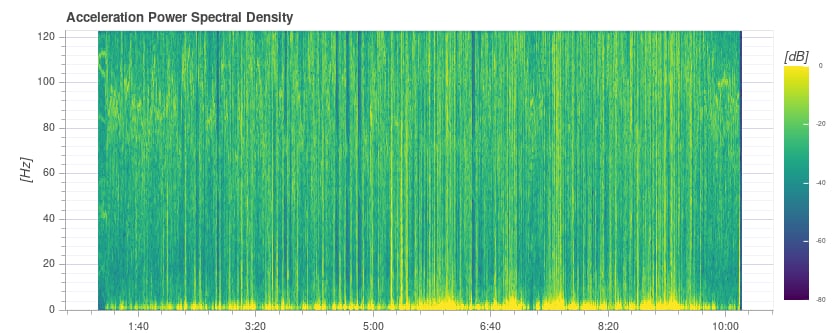
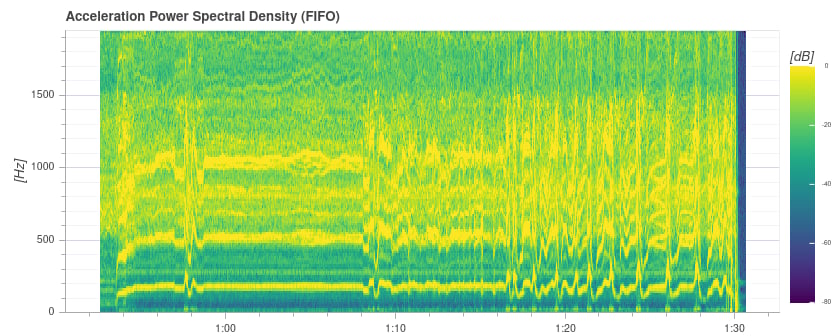
가속 전력 스펙트럼 밀도
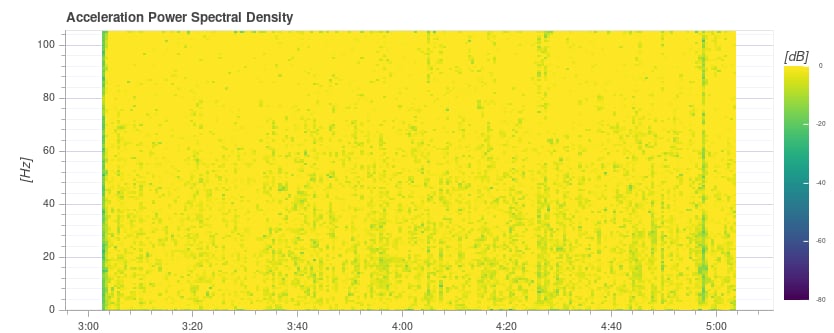
이는 시간 경과에 따른 원시 가속도계 데이터의 주파수 응답을 보여주는 2D 주파수 플롯입니다(x, y 및 z 축의 합을 표시함). 영역이 더 노란색일수록 해당 시간 및 주파수에서의 주파수 응답이 더 높습니다.
이상적으로는 몇 헤르츠까지 가장 낮은 부분만 노란색이고 나머지는 대부분 녹색이나 파란색입니다.
예: 좋은 진동
QAV-R 5″ 레이서 프레임(진동 우수).
DJI F450 프레임(진동 양호).
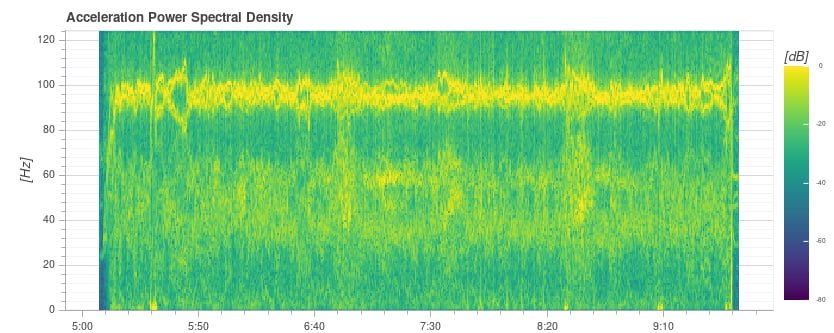
메모
위에서는 약 100Hz에서 프로펠러의 블레이드 통과 주파수를 볼 수 있습니다.
S500 프레임:
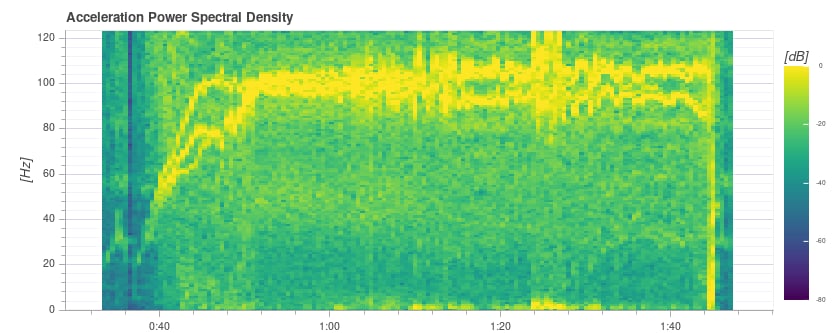
#예: 나쁜 진동
약 100Hz의 강한 노란색 선은 추가 조사가 필요한 잠재적인 문제를 나타냅니다(다른 차트 검토부터 시작).
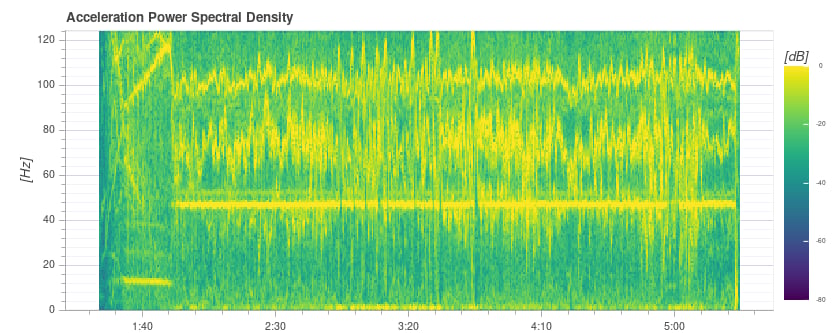
아래의 플롯은 50Hz에 가까운 주파수의 피크를 보여줍니다(이 경우 “느슨한” 랜딩 기어로 인해).
팁
이는 차량 역학에 가까운 강력한 단일 저주파이기 때문에 문제가 발생할 수 있음을 나타냅니다. 80Hz의 기본 필터 설정을 사용하면 50Hz에서의 진동은 필터링되지 않습니다.
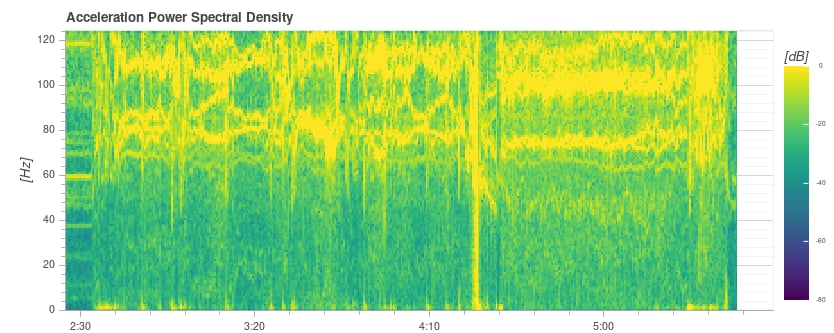
매우 높은(안전하지 않은) 진동! 그래프는 거의 완전히 노란색입니다.
경고
이렇게 높은 진동 수준으로 비행해서는 안 됩니다.
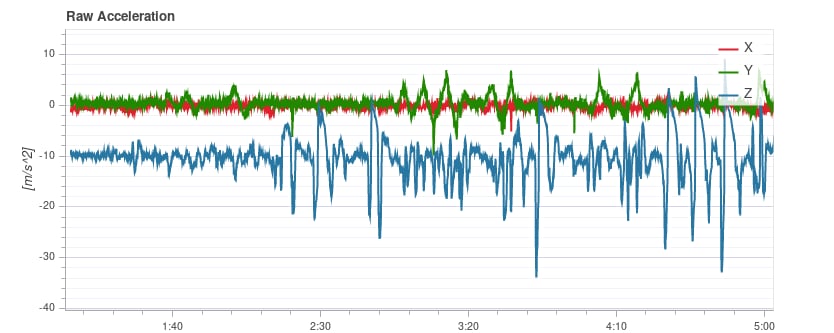
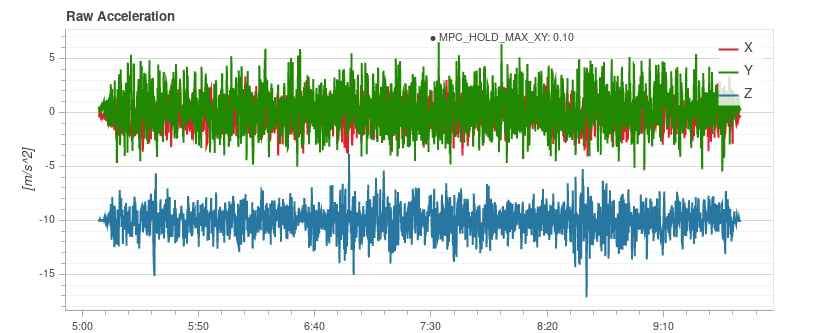
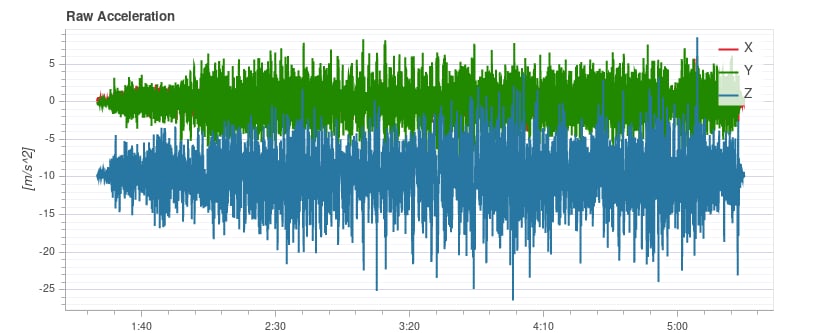
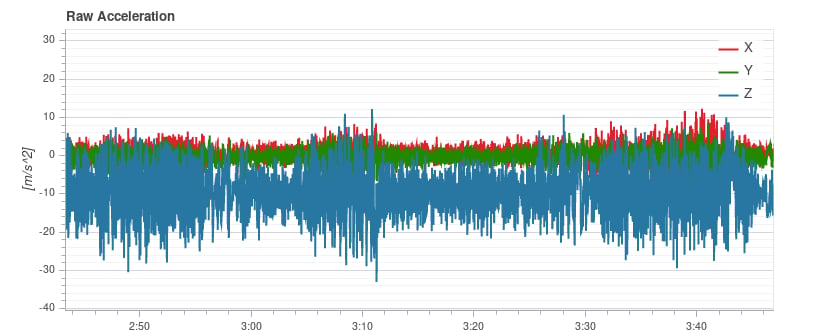
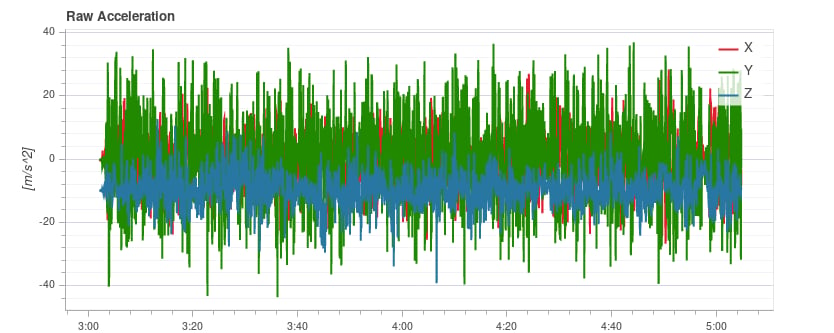
원시 가속계(Raw Acceleration)
이 그래프는 x, y 및 z 축에 대한 원시 가속도계 측정값을 보여줍니다. 이상적으로는 각 선이 가늘고 차량의 가속도를 명확하게 표시합니다.
경험상 호버링 또는 저속 비행 중에 z축 그래프가 x/y축 그래프에 닿으면 진동 수준이 너무 높은 것입니다.
팁
이 그래프를 사용하는 가장 좋은 방법은 차량이 떠 있는 부분을 조금 확대하는 것입니다.
예: 좋은 진동
QAV-R 5″ 레이서 프레임(진동 우수).

DJI F450 프레임(진동 양호).
예: 나쁜 진동
S500 프레임. 경계선 진동 수준 – x 및 y가 약간 높습니다(S500 기체의 경우 일반적임). 이는 비행 성능에 부정적인 영향을 미치기 시작하는 한계에 도달했습니다.
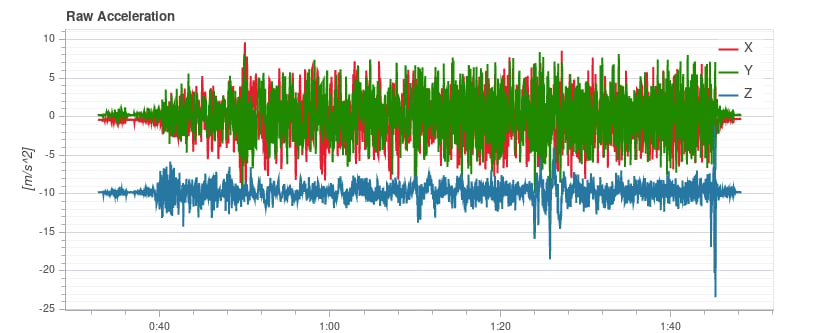
진동이 너무 높습니다. z축 그래프가 x/y축 그래프와 어떻게 겹치는지 확인하세요.
진동 수준이 너무 높습니다. z축 그래프가 x/y축 그래프와 어떻게 겹치는지 확인하세요.
매우 높은(안전하지 않은) 진동 수준.
경고
이렇게 높은 진동 수준으로 비행해서는 안 됩니다.
원시 고속 IMU 데이터 플롯
심층 분석을 위해 원시 IMU 데이터를 전체 속도(IMU에 따라 수 kHz)로 기록하는 옵션이 있습니다. 이를 통해 일반 로깅보다 훨씬 높은 주파수를 검사할 수 있어 진동 마운트를 선택하거나 저역 통과 및 노치 필터를 적절하게 구성할 때 도움이 될 수 있습니다.
이를 사용하려면 일부 매개변수를 변경해야 합니다.
- IMU_GYRO_RATEMAX 를 400으로 설정합니다 . 이렇게 하면 원시 센서 데이터가 센서에서 시스템의 나머지 부분으로 전송될 때 더욱 효율적으로 압축되고 로그 크기가 줄어듭니다(유용한 데이터를 줄이지 않음).
- IMU 데이터에는 높은 로깅 대역폭이 필요하므로 좋은 SD 카드를 사용하십시오(로깅 속도가 너무 높아지면 Flight Review에 드롭아웃이 표시됩니다).팁널리 사용되는 SD 카드를 비교하려면 로깅 > SD 카드를 참조하세요 .
- SDLOG_PROFILE 에서 자이로 또는 가속 FIFO 프로필을 활성화 하고 나머지 항목은 비활성화합니다. 정말 좋은 SD 카드를 사용하는 경우(드롭아웃이 거의 없음) 다음을 수행할 수 있습니다.
- 가속 및 자이로 프로필을 모두 활성화하거나
- 또는 가속/자이로와 기본 로깅 프로필을 활성화합니다.
예제 플롯:
메모
첫 번째 IMU의 데이터가 기록되는데, 이는 비행에 사용된 데이터와 반드시 동일할 필요는 없습니다. 이는 IMU가 다르게 마운트되는 경우(예: 하드 마운트 vs. 소프트 마운트)에만 중요합니다.
테스트 후에는 매개변수를 복원하는 것을 잊지 마십시오.
진동 문제 해결
진동의 원인(또는 여러 원인의 조합)을 로그만으로는 식별할 수 없는 경우가 많습니다.
이런 경우에는 차량을 검사해야 합니다. 진동 차단에서는 진동 수준을 줄이기 위해 확인하고 수행할 수 있는 몇 가지 기본 사항에 대해 설명합니다.
액추에이터 출력
액추에이터 출력 그래프는 개별 액추에이터(모터/서보)로 전송되는 신호를 보여줍니다. 일반적으로 이는 구성된 최소 및 최대 PWM 값 사이의 범위에 있습니다(예: 1000 ~ 2000).
다음은 모든 것이 정상인 쿼드로터의 예입니다(모든 신호가 범위 내에 있고 대략 서로 겹치며 잡음이 많지 않습니다).
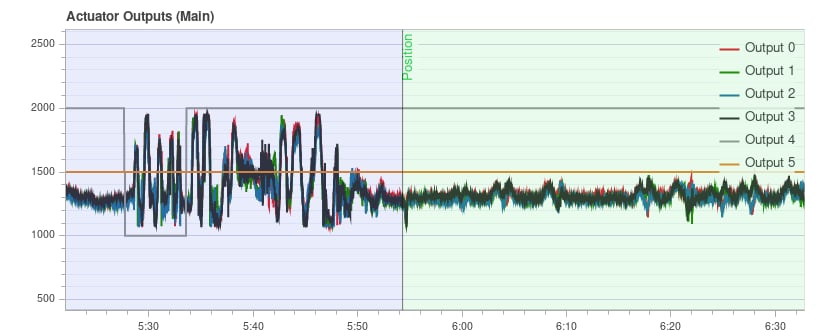
플롯은 다양한 문제를 식별하는 데 도움이 될 수 있습니다.
- 하나 이상의 신호가 오랜 시간 동안 최대치에 도달하면 컨트롤러가 포화 상태 에 도달했음을 의미합니다 . 이는 반드시 문제가 되는 것은 아닙니다. 예를 들어 최대 속도로 비행할 때 이는 예상되는 문제입니다. 그러나 예를 들어 임무 중에 이런 일이 발생한다면 이는 차량이 제공할 수 있는 추력에 비해 과체중임을 나타냅니다.
- 멀티콥터의 경우 플롯은 차량의 불균형 여부를 나타내는 좋은 지표가 될 수 있습니다 . 플롯에서는 하나 이상의 인접 모터(쿼드로터의 경우 2개)가 평균적으로 더 높은 추력으로 작동해야 함을 보여줍니다. 일부 모터가 다른 모터보다 더 많은 추력을 제공하거나 ESC가 보정되지 않은 경우에도 마찬가지입니다. 불균형 차량은 자동 조종 장치가 자동으로 이를 처리하므로 일반적으로 큰 문제가 되지 않습니다. 그러나 달성 가능한 최대 추력이 감소하고 일부 모터에 더 많은 부담이 가해지기 때문에 차량의 균형을 맞추는 것이 더 좋습니다.
- 불균형은 요 축에서도 발생할 수 있습니다. 플롯은 이전 사례와 유사하게 보이지만 반대쪽 모터는 각각 더 높거나 낮게 작동합니다. 원인은 하나 이상의 모터가 기울어졌을 가능성이 높습니다.다음은 헥사로터의 예입니다. 모터 1, 3, 6은 더 높은 추력으로 작동합니다.

- 신호에 노이즈가 매우 많은 경우(진폭이 높음) 두 가지 원인이 있을 수 있습니다. 컨트롤러를 통과하는 센서 노이즈 또는 진동(이는 다른 플롯에도 표시됩니다. 이전 섹션 참조) 또는 너무 높은 PID 게인입니다. 이것은 극단적인 예입니다:

GPS 불확실성
GPS 불확실성 플롯은 GPS 장치의 정보를 표시합니다.
- 사용된 위성 수(대략 12개 이상이어야 함)
- 수평 위치 정확도(1미터 미만이어야 함)
- 수직 위치 정확도(2미터 미만이어야 함)
- GPS 수정: 3D GPS 수정의 경우 3, GPS + 추측 항법의 경우 4, RTK 부동의 경우 5, RTK 고정 유형의 경우 6입니다.
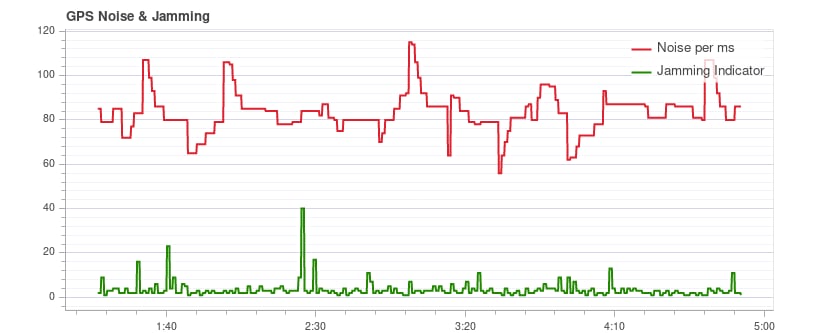
GPS 노이즈 및 전파 방해
GPS 노이즈 및 전파 방해 플롯은 GPS 신호 간섭 및 전파 방해를 확인하는 데 유용합니다. GPS 신호는 매우 약하므로 GPS에서 사용하는 주파수로 전송(케이블을 통해)하거나 방사하는 구성 요소에 의해 쉽게 방해/재밍될 수 있습니다.
재밍 표시기는 약 40 이하여야 합니다. 약 80 이상의 값은 너무 높으므로 설정을 검사해야 합니다. GPS 수정이 불가능한 지점까지 정확도가 감소하고 위성 수가 적어 신호 간섭도 눈에 띕니다.
이것은 간섭이 없는 예입니다.
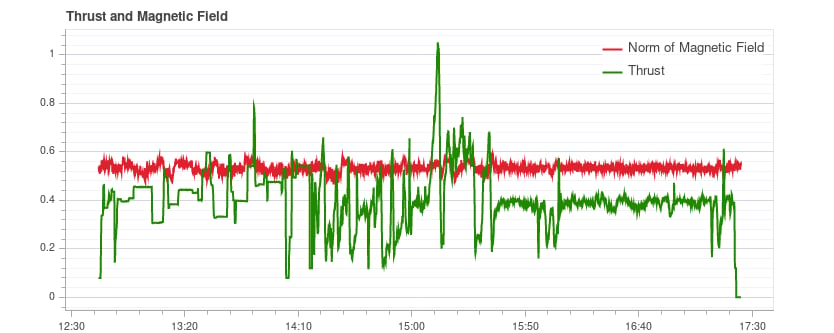
추력과 자기장
추력 및 자기장 플롯은 자기 센서 측정 벡터의 추력과 표준을 보여줍니다.
표준은 비행 전체에 걸쳐 일정해야 하며 추력과 상관관계가 없어야 합니다. 이는 표준이 상수에 매우 가까운 좋은 예입니다.
상관 관계가 있으면 모터(또는 다른 소비자)가 끌어오는 전류가 자기장에 영향을 미치고 있음을 의미합니다. 이는 잘못된 요 추정으로 이어지므로 피해야 합니다. 다음 플롯은 자력계의 추력과 표준 사이의 강한 상관관계를 보여줍니다.
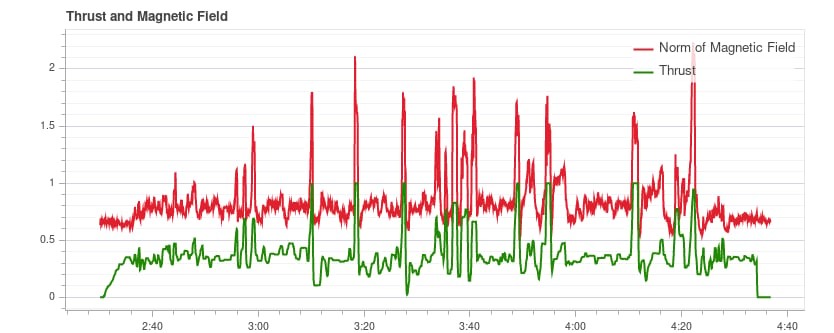
이에 대한 해결책은 다음과 같습니다.
- 외부 자력계 사용(내부 자력계 사용 방지)
- 외부 자력계를 사용하는 경우 강한 전류에서 더 멀리 이동하십시오(예: (더 긴) GPS 마스트 사용)
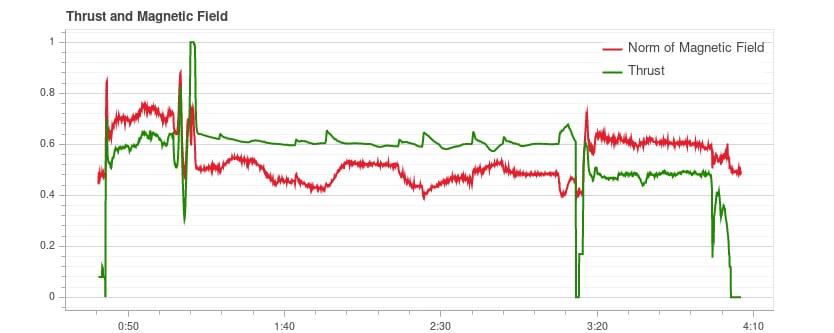
표준이 상관관계가 없지만 일정하지 않은 경우 적절하게 보정되지 않았을 가능성이 높습니다. 그러나 외부 방해로 인해 발생할 수도 있습니다(예: 금속 구조물 가까이로 비행하는 경우).
이 예는 표준이 일정하지 않지만 추력과 상관 관계가 없음을 보여줍니다.
추정기 Watchdog
Estimator Watchdog 플롯은 추정기의 상태 보고서를 표시합니다. 상수 0이어야 합니다.
문제가 없다면 다음과 같습니다.
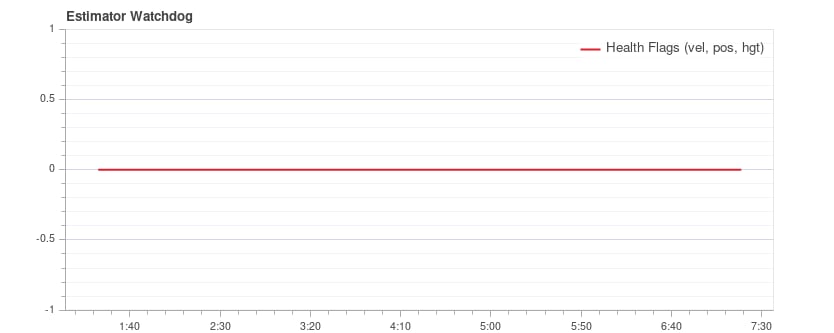
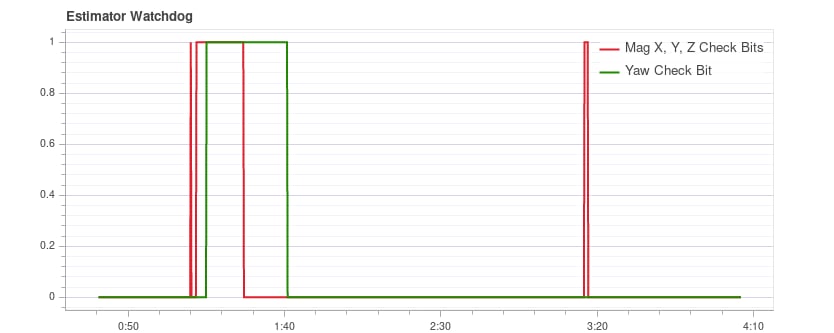
플래그 중 하나가 0이 아닌 경우 추정기는 추가 조사가 필요한 문제를 감지한 것입니다. 대부분의 경우 이는 센서 문제(예: 자력계 간섭)입니다. 일반적으로 해당 센서의 플롯을 보는 것이 도움이 됩니다.
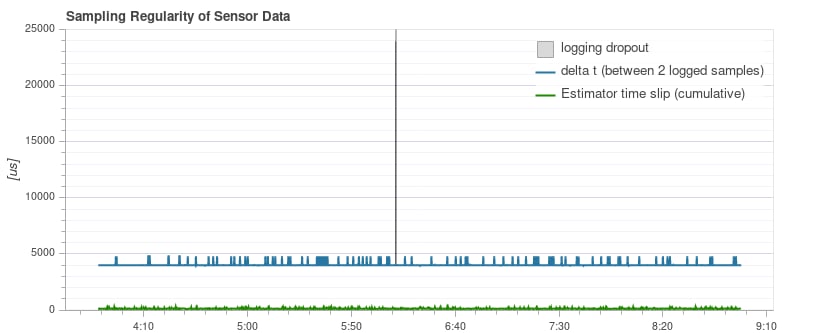
센서 데이터의 샘플링 규칙성
샘플링 규칙성 플롯은 로깅 시스템 및 예약 문제에 대한 통찰력을 제공합니다.
로그 버퍼가 너무 작거나, 로깅 속도가 너무 높거나, 품질이 낮은 SD 카드를 사용하는 경우 로깅 누락 량이 증가하기 시작합니다.
메모
중간 품질의 카드에서는 가끔 누락이 발생할 수 있습니다.
델타 t는 기록된 두 IMU 샘플 간의 시간 차이를 보여줍니다. 데이터 게시 속도가 250Hz이므로 4ms에 가까워야 합니다. 그 배수인 스파이크가 있고 추정기 시간 지연이 증가하지 않는 경우 이는 로거가 일부 샘플을 건너뛴 것을 의미합니다. 때때로 로거가 낮은 우선순위로 실행되기 때문에 이런 일이 발생할 수 있습니다. 배수가 아닌 스파이크가 있는 경우 조사가 필요한 불규칙한 센서 드라이버 스케줄링을 나타냅니다.
추정기 타임슬립은 현재 시간과 그 시간까지의 통합 센서 간격의 시간 차이를 보여줍니다. 변경되면 추정기가 센서 데이터를 놓쳤거나 드라이버가 잘못된 통합 간격을 게시했음을 의미합니다. 0으로 유지되어야 하지만 비행 중 매개변수 변경으로 인해 약간 증가할 수 있으며 이는 일반적으로 문제가 되지 않습니다.
이것은 좋은 예입니다:
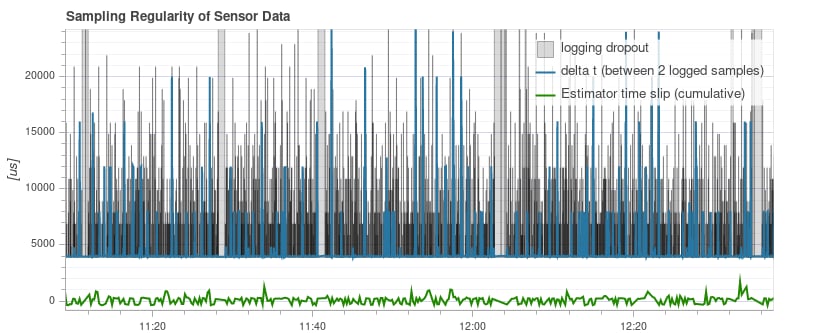
다음 예에는 드롭아웃이 너무 많이 포함되어 있으며 이 경우 사용된 SD 카드의 품질이 너무 낮았습니다( 좋은 SD 카드는 여기를 참조하세요).
기록된 메시지
시스템 오류 및 경고 메시지가 포함된 표입니다. 예를 들어 작업의 스택 크기가 낮아지는 경우를 표시합니다.
메시지를 개별적으로 검사해야 하며 모든 메시지가 문제를 나타내는 것은 아닙니다. 예를 들어 다음은 킬 스위치 테스트를 보여줍니다.

비행/프레임 로그 검토 예
차량 상태를 분석할 때 특정 항공편에 대한 여러 차트를 살펴보는 것이 좋습니다. 차트가 다르면 일부 문제를 더 잘 강조할 수 있습니다. 이는 가능한 진동 문제를 검토할 때 특히 중요합니다.
아래 섹션에서는 항공편/차량별로 몇 가지(이전에 제시된) 차트를 그룹화합니다.
QAV-R 5″ 레이서
이 차트는 모두 QAV-R 5″ Racer 의 동일한 비행에서 나온 것입니다 .
진동이 매우 낮은 차량을 보여줍니다.
- 액추에이터 제어 FFT는 가장 낮은 끝에서 단일 피크만 표시하고 나머지는 낮고 평평합니다.
- 스펙트럼 밀도는 대부분 녹색이며 낮은 주파수에서는 약간의 노란색만 나타납니다.
- 원시 가속에는 x/y축 추적과 잘 분리된 z축 추적이 있습니다.