
헬리콥터/비행기/로버는 GPS, 나침반 및 기타 포지셔닝 기술과의 통합을 지원합니다.
GPS/나침반
- Avionics Anonymous GNSS + Compass
- Avionics Anonymous Compass
- Beitain BN-220 GPS / BN-880 GPS + Compass Module
- CUAV Neo v2 Pro DroneCAN GPS
- CUAV Neo 3 Pro DroneCAN GPS
- CUAV Neo 3(M9N) GPS
- Hex Here 2 DroneCAN GPS/Gyro/IMU/Baro
- Holybro DroneCAN M8/M9 GPS
- Holybro Micro M8N GPS Module
- Holybro Nano Ublox M8 5883 GPS Module
- Holybro M8N (Pixhawk 4) GPS Module
- Holybro M9N GPS Module
- Holybro DroneCAN RM3100 Professional Grade Compass
- Matek DroneCAN AP_Periph GNSS M10-L4-3100
- Matek SAM-M8Q
- Matek M8Q-CAN/DroneCAN GPS+Compass+Baro+Airspeed I2C port
- mRo GPS, GPS+Compass,RTK, and DroneCAN modules
- mRo Locaton One DroneCAN GPS/Compass
- Qiotek DroneCAN RM3100 Compass
RTK GPS
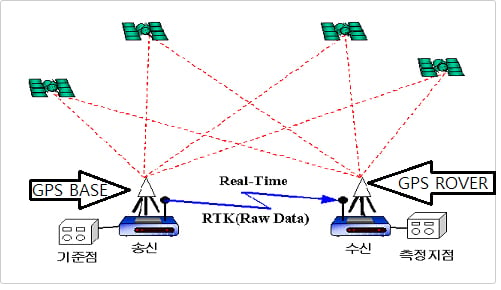
이러한 GPS는 내부에서 생성되거나 외부에서 제공되는 실시간 운동학 데이터를 통합하여 일반적인 GPS 미터 범위에서 센티미터 범위까지 위치 추정의 정확도를 향상시킬 수 있습니다(RTK GPS 보정(고정 기준선) 참조 ). 이 향상된 정밀도는 또한 특정 RTK GPS(F9P 기반) 또는 전용 이동 기준선 GPS가 있는 차량에서 두 개의 장치를 사용하여 “이동 기준선” 요 추정을 허용합니다. Yaw용 GPS(움직이는 기준선이라고도 함)를 참조하십시오.
ArduSimple RTK GPS- Ark RTK GPS
- Blicube RTK GPS (Single Unit Moving Baseline)
- CUAV C-RTK 9P RTK Receiver
- CUAV C-RTK 9Ps RTK Receiver
- CUAV C-RTK2 PPK and RTK receiver
- CUAV C-RTK2 HP Heading and RTK receiver
- Emlid Reach RTK Receiver
- Freefly RTK GPS Ground Station
- Foxteck AEROFOX F9P-RTK
- Hex Here+ RTK Receiver
- Hitec PositionPro GNSS
- Holybro DroneCAN H-RTK F9P Rover
- Holybro DroneCAN H-RTK F9P Helical
- Holybro RTK M8P Family
- Holybro RTK F9P Family
- Holybro RTK NEMA UM-982 GPS
- LOCOSYS HAWK R1 RTK GNSS / R2 RTK GNSS + Compass
- Qiotek DroneCAN RTK-F9P GPS
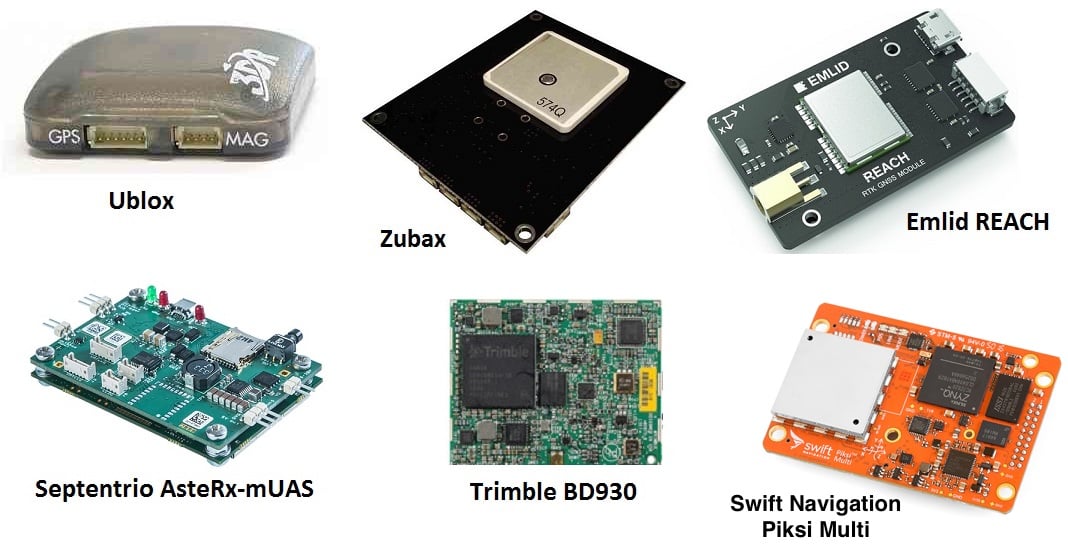
- Swift Navigation’s Piksi Multi RTK GPS Receiver
- Septentrio AsteRx-mUAS RTK GPS
- Synerx MDU-2000 RTK + LTE GPS
- Trimble BD930 RTK GPS
메모
SERIALx_PROTOCOLGPS 프로토콜에 대해 구성된 첫 번째 포트에서 찾을 수 없는 경우 부팅 중에 GPS 검색을 중지하기 때문에 매개변수가 “5”(GPS)로 설정된 첫 번째 SERIALx 포트에 GPS를 연결하는 것이 중요합니다 .
GPS 드라이버 옵션
몇 가지 GPS 작동 옵션이 GPS_DRV_OPTIONS 매개변수 에 의해 제공됩니다 . 이 매개변수는 비트 마스크이며 동시에 여러 옵션을 선택할 수 있습니다.
- 비트 0: 설정되면 RTK 보정 데이터를 자동 조종 장치를 통하지 않고 Yaw용 GPS용 두 번째 UART 포트(즉, 이동 기준선)를 통해 첫 번째 GPS에서 두 번째 GPS로 직접 보냅니다 .
- 비트 1: 설정된 경우 사용자 지정 베이스 및 GPS_MB1 오프셋을 사용하여 SBF 이동 베이스라인 요를 활성화합니다.
- 비트 2: 설정된 경우 더 높은 속도를 지원하지 않는 GPS의 최대 직렬 데이터 속도에 115.2Kbaud를 사용합니다.
- 비트 3: 설정된 경우 자동 조종 장치 대신 CAN을 통해 두 개의 CAN GPS 간에 RTK 데이터를 라우팅합니다.
- 비트 4: 설정된 경우 GPS는 높이 AMSL 대신 타원체 높이로 고도를 보고합니다.
GPS 자동 전환
두 개의 GPS 장치를 사용하는 경우 GPS_AUTO_SWITCH 로 선택할 수 있는 전환 옵션이 많이 있습니다 .
- 0: 기본 사용항상 기본 GPS를 사용합니다. 이것은 GPS_PRIMARY 로 설정된 대로 첫 번째 또는 두 번째가 될 수 있습니다.
- 1: 가장 잘 사용최상의 GPS를 자동으로 선택합니다. GPS 수정 상태(2D / 3D / rtk)를 기반으로 수행됩니다. 두 GPS의 수정 상태가 같으면 위성 수가 더 많은 GPS가 사용됩니다.
- 2: 블렌드혼합은 두 개의 동일한 GPS 장치와 함께 사용하기에 가장 적합합니다. GPS 혼합을 참조하십시오.
- 4: 3D 수정 이상이면 기본 사용3D 수정 이상이 있는 경우 GPS_PRIMARY 로 설정된 기본 GPS를 사용합니다 . 이것은 두 개의 서로 다른 GPS 장치, 즉 하나의 고품질 기본 장치와 덜 정확한 보조 장치를 사용할 때 사용해야 합니다. 이 경우 고품질 GPS는 위성 수가 적더라도 더 나은 품질 수정을 제공하는 경우가 많습니다. 이 경우 ‘최선 사용’을 사용하면 품질이 떨어지는 GPS를 사용하게 되고 GPS 단위 간에 더 많이 전환하게 됩니다. ‘기본 사용’과 달리 이 옵션은 기본에서 3D 수정이 손실된 경우 여전히 보조 GPS로 폴백할 수 있습니다.
GPS 전환의 추가 변형은 EKF3 선호도 및 차선 전환 입니다 . GPS를 사용하도록 EKF 레인을 설정할 수 있으며 전체 EKF 레인은 상태에 따라 전환됩니다. GPS_PRIMARY가 차선에 사용되고 GPS_AUTO_SWITCH가 활성화된 경우 차선은 GPS_AUTO_SWITCH 설정에 따라 결정된 GPS 정보를 사용합니다.
고급 사용
- 고정 기준선 RTK GPS 보정
- GPS 혼합(일명 듀얼 GPS)
- Yaw용 GPS(움직이는 기준선이라고도 함)
- GPS – 작동 원리
- U-Blox F9P 펌웨어 업데이트 절차
오픈소스 GPS 비교
| 모델명 | M10-L4-3100 | M10-5883 | M9N-5883 | M8Q-5883 |
| UBlox | MAX-M10S | MAX-M10S | 네오-M9N | SAM-M8Q |
| GNSS | GPSBeiDouGLONASS갈릴레오 | GPSBeiDouGLONASS갈릴레오 | GPSBeiDouGLONASS갈릴레오 | GPSGLONASS갈릴레오 |
| 위치 정확도 | 1.5m CEP | 1.5m CEP | 2.0m 포켓 | 2.5m CEP |
| 추적 및 탐색 | -168dBm | -168dBm | -167dBm | -165dBm |
| 재취득 | -160dBm | -160dBm | -160dBm | -158dBm |
| 콜드 스타트 | -148dBm | -148dBm | -148dBm | -146dBm |
| 핫 스타트 | -159dBm | -159dBm | -159dBm | -155dBm |
| 탐색 업데이트 속도 | 5Hz, 10Hz | 5Hz, 10Hz | 5Hz | 5Hz, 10Hz |
| | | | | |
| 나침반 | RM3100 | QMC5883L | QMC5883L | QMC5883L |
| 그것을 배우십시오 | SPL06-001 | / | / | / |
| 상호 작용 | CAN4WiresJST-GH 커넥터 | UART+I2C6와이어JST-GH 커넥터 | UART+I2C6와이어JST-GH 커넥터 | UART+I2C6와이어JST-SH 커넥터 |
| CAN 노드 | 디지털 대기 속도 지원 | / | / | / |
| | | | | |
| 크기 | 36*36*12 | 23*23*10 | 32*32*10 | 20*20*10 |
| 무게 | 16g | 9g | 15g | 7g |



