
강좌 영상

Pixhawk FC 와 컴패니언 컴퓨터
아래 다이어그램은 비행 컨트롤러와 컴패니언 컴퓨터(여기서는 “Mission Computer”라고 함)를 모두 포함하는 PX4 시스템을 보여줍니다.
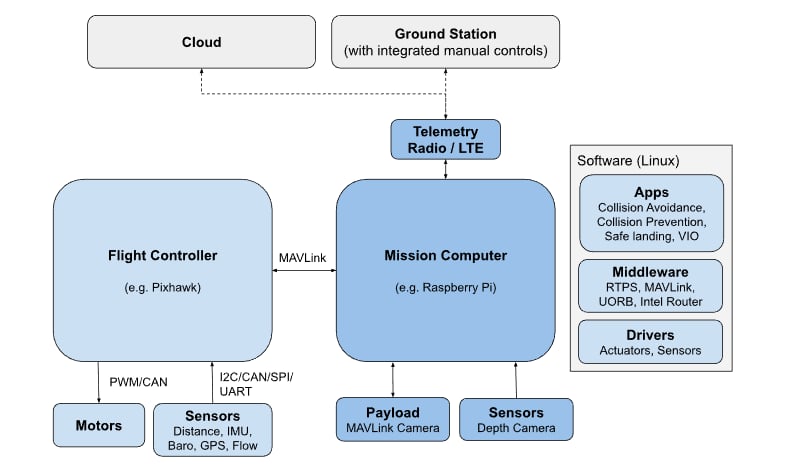
비행 컨트롤러는 일반 PX4 비행 스택을 실행하는 반면, 컴패니언 컴퓨터는 물체 회피 및 충돌 방지 와 같은 고급 기능을 제공합니다 . 두 시스템은 고속 직렬 또는 IP 링크를 사용하여 연결되며 일반적으로 MAVLink 프로토콜을 사용하여 통신합니다. 지상국 및 클라우드와의 통신은 일반적으로 보조 컴퓨터(예: MAVLink 라우터 사용)를 통해 라우팅됩니다.
PX4 시스템은 일반적으로 보조 컴퓨터에서 Linux OS를 실행합니다. 프로젝트는 Linux용으로 설계된 ROS 기반 회피 라이브러리를 제공합니다. Linux는 NuttX보다 “일반” 소프트웨어 개발을 위한 훨씬 더 나은 플랫폼입니다. 더 많은 Linux 개발자가 있으며 많은 유용한 소프트웨어가 이미 작성되었습니다). 컴패니언 컴퓨터는 때때로 같은 이유로 Android를 실행합니다.



