
PX4는 두 가지 주요 레이어로 구성됩니다. 비행 스택 은 추정 및 비행 제어 시스템이고, 미들웨어 는 모든 유형의 자율 로봇을 지원할 수 있는 일반 로봇 레이어로 내부/외부 통신 및 하드웨어 통합을 제공합니다.
모든 PX4 플랫폼은 단일 코드베이스를 공유합니다(여기에는 보트, 탐사선, 잠수함 등과 같은 다른 로봇 시스템이 포함됩니다). 전체 시스템 설계는 반응적 입니다, 의미하는 것은:
- 모든 기능은 교환 가능한 구성 요소와 재사용 가능한 구성 요소로 구분됩니다.
- 통신은 비동기 메시지 전달을 통해 이루어집니다.
- 시스템은 다양한 작업 부하를 처리할 수 있습니다.
High Level 소프트웨어 아키텍처
아래 다이어그램은 PX4의 빌딩 블록에 대한 자세한 개요를 제공합니다. 다이어그램의 상단 부분에는 미들웨어 블록이 포함되어 있고 하단 부분에는 플라이트 스택의 구성 요소가 표시됩니다.
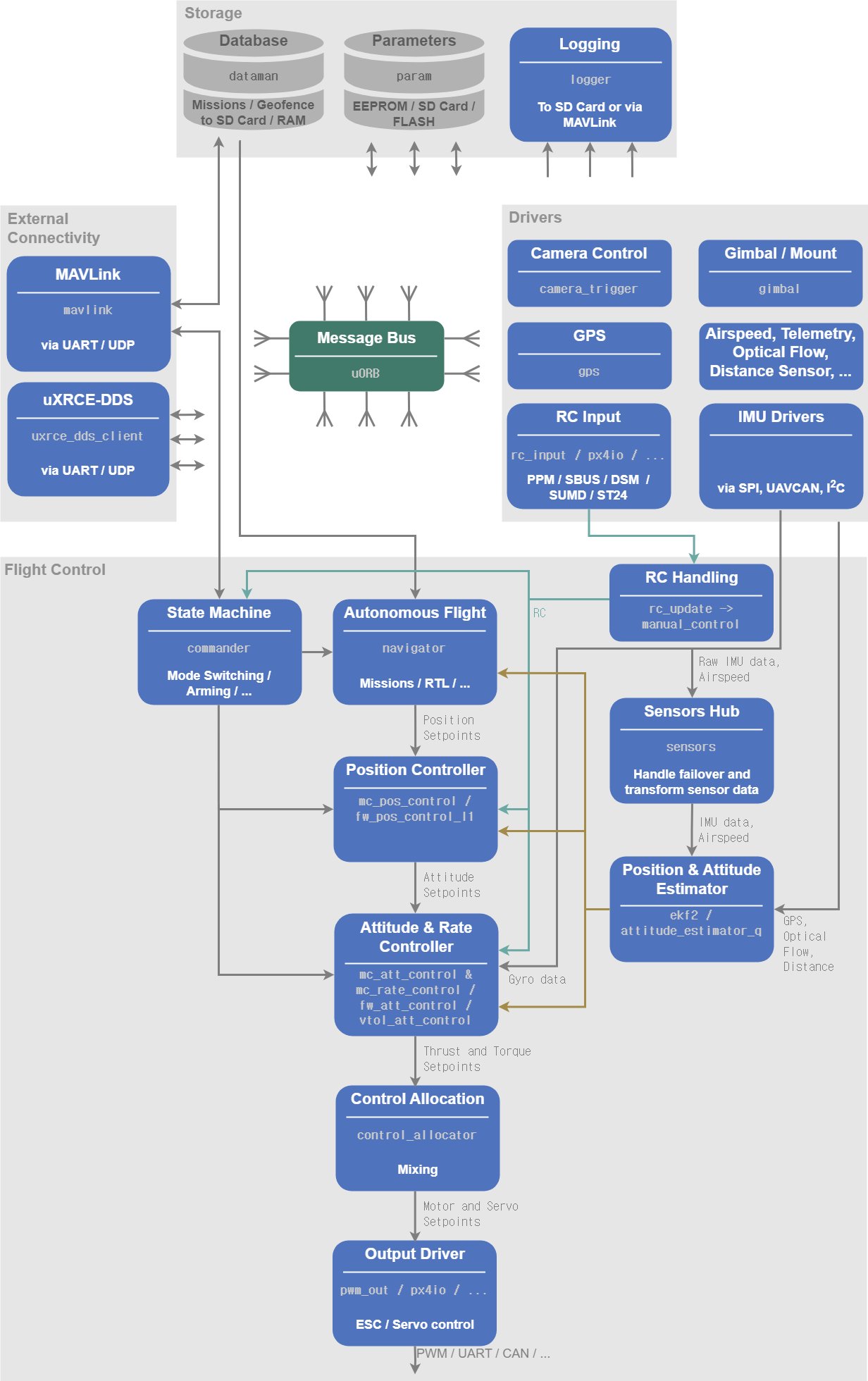
소스 코드는 자체 포함된 모듈/프로그램으로 분할됩니다( monospace다이어그램에 표시됨). 일반적으로 빌딩 블록은 정확히 하나의 모듈에 해당합니다.
팁
런타임 시 쉘의
top명령으로 어떤 모듈이 실행되는지 확인할 수 있으며,<module_name> start/stop를 통해 각 모듈을 개별적으로 시작/중지할 수 있습니다 .top명령은 NuttX 쉘 에만 적용되지만 다른 명령은 SITL 쉘(pxh>)에서도 사용할 수 있습니다. 각 모듈에 대한 자세한 내용은 모듈 및 명령 참조 를 참조하세요 .
화살표는 모듈 간의 가장 중요한 연결 에 대한 정보 흐름을 보여줍니다 . 실제로는 표시된 것보다 더 많은 연결이 있으며 대부분의 모듈에서 일부 데이터(예: 매개변수용)에 액세스합니다.
모듈은 uORB 라는 게시-구독 메시지 버스를 통해 서로 통신합니다 . 게시-구독 체계를 사용한다는 것은 다음을 의미합니다.
- 시스템은 반응적입니다. 비동기식이며 새 데이터가 사용 가능해지면 즉시 업데이트됩니다.
- 모든 작업과 통신이 완전히 병렬화됩니다.
- 시스템 구성 요소는 스레드로부터 안전한 방식으로 어디에서나 데이터를 사용할 수 있습니다.
메모
이 아키텍처를 사용하면 이러한 블록 하나하나를 런타임 중에도 빠르고 쉽게 교체할 수 있습니다.
플라이트 스택
플라이트 스택은 자율 드론을 위한 안내, 탐색 및 제어 알고리즘의 모음입니다. 여기에는 고정익, 멀티로터 및 VTOL 기체용 컨트롤러와 자세 및 위치 추정기가 포함됩니다.
다음 다이어그램은 플라이트 스택의 빌딩 블록에 대한 개요를 보여줍니다. 여기에는 센서, RC 입력 및 자율 비행 제어(내비게이터)부터 모터 또는 서보 제어(액추에이터)까지 전체 파이프라인이 포함됩니다.
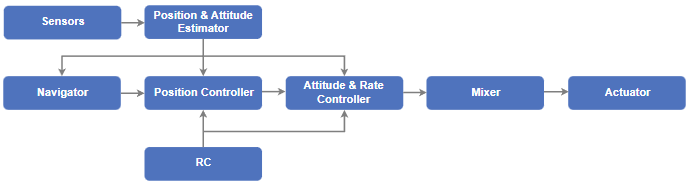
추정기(Estimator)는 하나 이상의 센서 입력을 가져와 결합하고 차량 상태(예: IMU 센서 데이터의 자세)를 계산합니다.
컨트롤러는 설정점과 측정 또는 추정 상태(프로세스 변수)를 입력으로 사용하는 구성 요소입니다. 그 목표는 설정값과 일치하도록 프로세스 변수의 값을 조정하는 것입니다. 출력은 결국 해당 설정점에 도달하기 위한 수정입니다. 예를 들어 위치 컨트롤러는 위치 설정점을 입력으로 사용하고, 프로세스 변수는 현재 추정된 위치이며, 출력은 차량을 원하는 위치로 이동시키는 자세 및 추력 설정점입니다.
믹서는 강제 명령(예: “우회전”)을 받아 이를 개별 모터 명령으로 변환하는 동시에 일부 제한을 초과하지 않도록 합니다. 이 변환은 차량 유형에 따라 다르며 무게 중심을 기준으로 한 모터 배열이나 차량의 회전 관성과 같은 다양한 요인에 따라 달라집니다.
미들웨어
미들웨어 는 주로 내장 센서, 외부 세계(컴패니언 컴퓨터, GCS 등)와의 통신 및 uORB 게시-구독 메시지 버스를 위한 장치 드라이버로 구성됩니다.
또한 미들웨어에는 PX4 비행 코드를 데스크톱 운영 체제에서 실행하고 시뮬레이션된 “세계”에서 컴퓨터 모델링 차량을 제어할 수 있는 시뮬레이션 레이어가 포함되어 있습니다.
Rate 업데이트
모듈은 메시지 업데이트를 기다리기 때문에 일반적으로 드라이버는 모듈 업데이트 속도를 정의합니다. 대부분의 IMU 드라이버는 1kHz에서 데이터를 샘플링하고 이를 통합한 후 250Hz로 게시합니다.
메시지 업데이트 속도는 uorb top를 실행하여 시스템에서 실시간으로 확인할 수 있습니다 .
런타임 환경
PX4는 POSIX-API를 제공하는 다양한 운영 체제(예: Linux, macOS, NuttX 또는 QuRT)에서 실행됩니다. 또한 어떤 형태의 실시간 스케줄링(예: FIFO)도 있어야 합니다.
모듈 간 통신( uORB 사용 )은 공유 메모리를 기반으로 합니다. 전체 PX4 미들웨어는 단일 주소 공간에서 실행됩니다. 즉, 모든 모듈 간에 메모리가 공유됩니다.
메모
시스템은 최소한의 노력으로 별도의 주소 공간에서 각 모듈을 실행할 수 있도록 설계되었습니다.
모듈을 실행하는 방법에는 두 가지가 있습니다.
- 작업 : 모듈은 자체 스택 및 프로세스 우선순위를 사용하여 자체 작업에서 실행됩니다.
- 작업 대기열 작업 : 모듈은 공유 작업 대기열에서 실행되며 대기열의 다른 모듈과 동일한 스택 및 작업 대기열 스레드 우선 순위를 공유합니다.
- 모든 작업은 서로 방해할 수 없으므로 협력적으로 작동해야 합니다.
- 여러 작업 대기열 작업이 하나의 대기열에서 실행될 수 있으며 대기열이 여러 개 있을 수 있습니다.
- 작업 대기열 작업은 미래의 고정 시간을 지정하거나 uORB 주제 업데이트 콜백을 통해 예약됩니다.
메모
작업 대기열에서 실행 중인 작업은 top에 표시되지 않습니다(작업 대기열 자체만 볼 수 있음 – 예: wq:lp_default).
work_queue status 은 모든 활성 작업 대기열 항목을 표시하는 데 사용됩니다 .
백그라운드 작업
px4_task_spawn_cmd()
호출(상위) 작업과 독립적으로 실행되는 새 작업(NuttX) 또는 스레드(POSIX – Linux/macOS)를 시작하는 데 사용됩니다.
independent_task = px4_task_spawn_cmd(
"commander", // Process name
SCHED_DEFAULT, // Scheduling type (RR or FIFO)
SCHED_PRIORITY_DEFAULT + 40, // Scheduling priority
3600, // Stack size of the new task or thread
commander_thread_main, // Task (or thread) main function
(char * const *)&argv[0] // Void pointer to pass to the new task
// (here the commandline arguments).
);OS별 정보
NuttX
NuttX 비행 제어 보드에서 PX4를 실행하기 위한 기본 RTOS입니다. 오픈 소스(BSD 라이센스)이며 가볍고 효율적이며 매우 안정적입니다.
모듈은 작업으로 실행됩니다. 자체 파일 설명자 목록이 있지만 단일 주소 공간을 공유합니다. 작업은 파일 설명자 목록을 공유하는 하나 이상의 스레드를 시작할 수 있습니다.
각 작업/스레드에는 고정 크기 스택이 있으며 모든 스택에 충분한 여유 공간이 남아 있는지 확인하는 주기적인 작업이 있습니다(스택 색상 기준).
Linux/MacOS
Linux 또는 macOS에서 PX4는 단일 프로세스에서 실행되며 모듈은 자체 스레드에서 실행됩니다(NuttX에서와 같이 작업과 스레드 간에 구별이 없습니다).



