Q650 시리즈자율주행드론은 GPS가 수신되는 지상과 GPS가 수신되지 않는 지역(지하, 터널 등)에서 모두 사용할 수 있는 픽스호크(PX4) 기반의 다목적 자율주행 드론 입니다.
Q650 자율주행드론은 2가지의 비행 모드를 가지고 있습니다.
- GPS 모드 + 자율주행기능(RealSense D435 – 옵션)
- non-GPS VIO 모드 + 자율주행기능(RealSense D4xx – 옵션)
1. GPS 모드
GPS 모드에서 드론은 일반적인 픽스호크와 동일한 수동, 자동비행 모드의 비행 옵션을 지원하며, MAVSDK/MAVROS/ROS2 uORB를 통해 프로그래밍으로 드론을 오프보드(OFFBOARD) 모드로 제어할 수 있습니다.
또한, 자율비행 옵션 선택시 RealSense D4xx 계열의 심도 카메라를 이용하여 자율 회피 비행을 수행하는ROS2 기반의 V-SLAM 기반의 드론 개발에 용이 합니다.
2. Optical-Flow & LiDAR 모드
고성능 Optical-Flow와 LiDAR 센서를 이용해 GPS가 수신되지 않는 지역에서도 위치 비행 및 호버링이 가능 합니다.
3. non-GPS VIO 모드
non-GPS VIO 모드는 카메라 센서를 이용하여 VIO(Visual Innertial Odometry) 위치 비행이 가능 합니다. 따라서, 별도의 GPS 수신 없이도 드론은 자신의 위치를 파악하여 실내, 터널 등에서 자율 비행이 가능 합니다.
또한, 자율비행 옵션 선택시 RealSense D4xx 계열의 심도 카메라를 이용하여 자율 회피 비행을 수행하며, ROS2 기반의 실시간 SLAM 툴과 알고리즘을 이용하여 V-SLAM 기반의 드론 개발에 용이 합니다.
T265 카메라를 이용한 non-GPS VIO 모드는 ROS1 까지만 지원 합니다. (Intel RealSense T265 트래킹 카메라는 단종되어 더이상 판매하지 않습니다.)
4.360도 LiDAR 스캐너를 이용한 SLAM
Livox Mid-360과 같은 360도 LiDAR 스캐너를 이용하여 SLAM을이용한 VINS(Vision-INS) 기반의 자율비행을 가능하게 할 수 있습니다.
5. 시뮬레이터
Q650 드론은 PX4-SITL과 Gazebo 시뮬레이터를 이용하여 시뮬레이션 테스트를 수행할 수 있습니다.
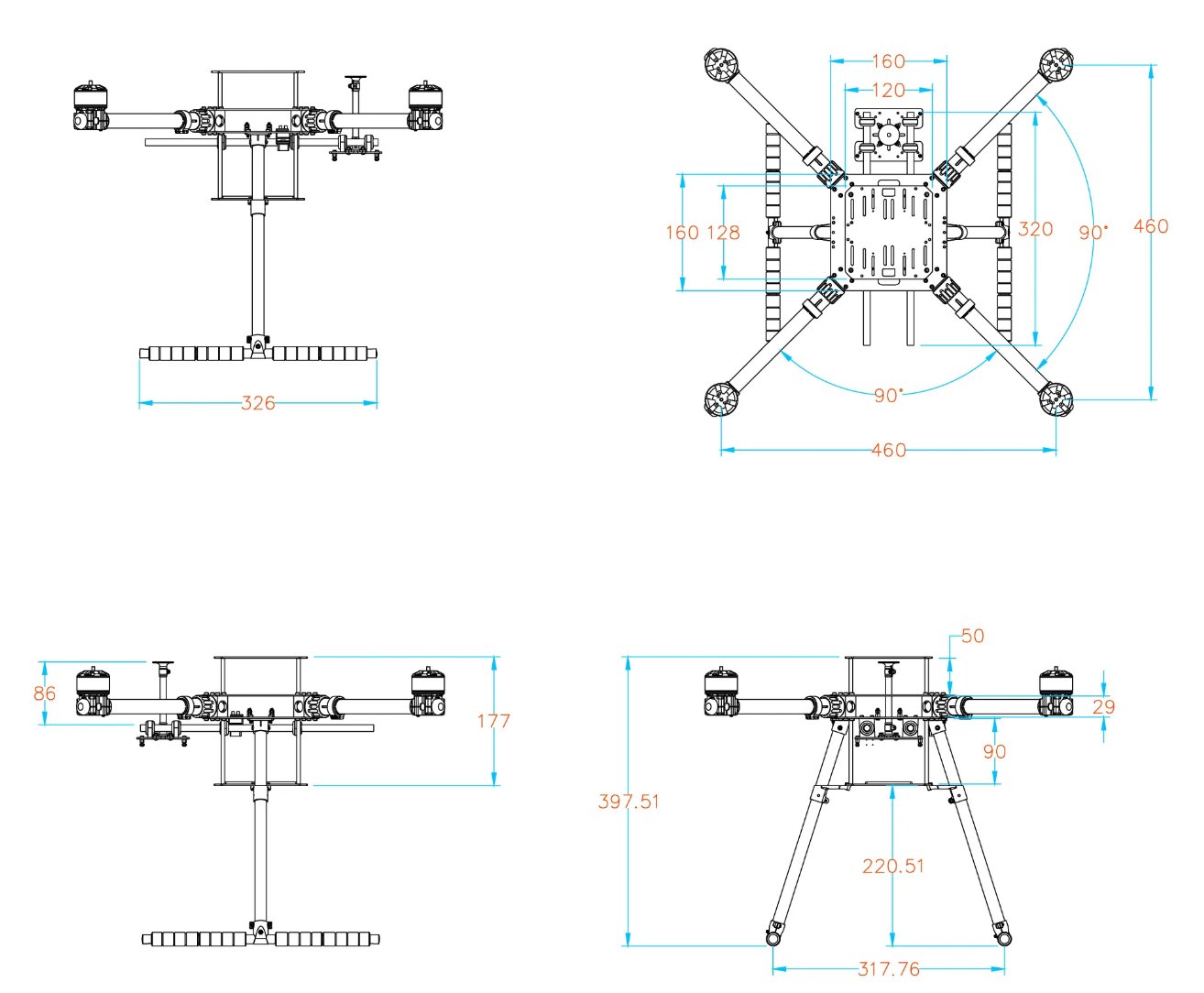
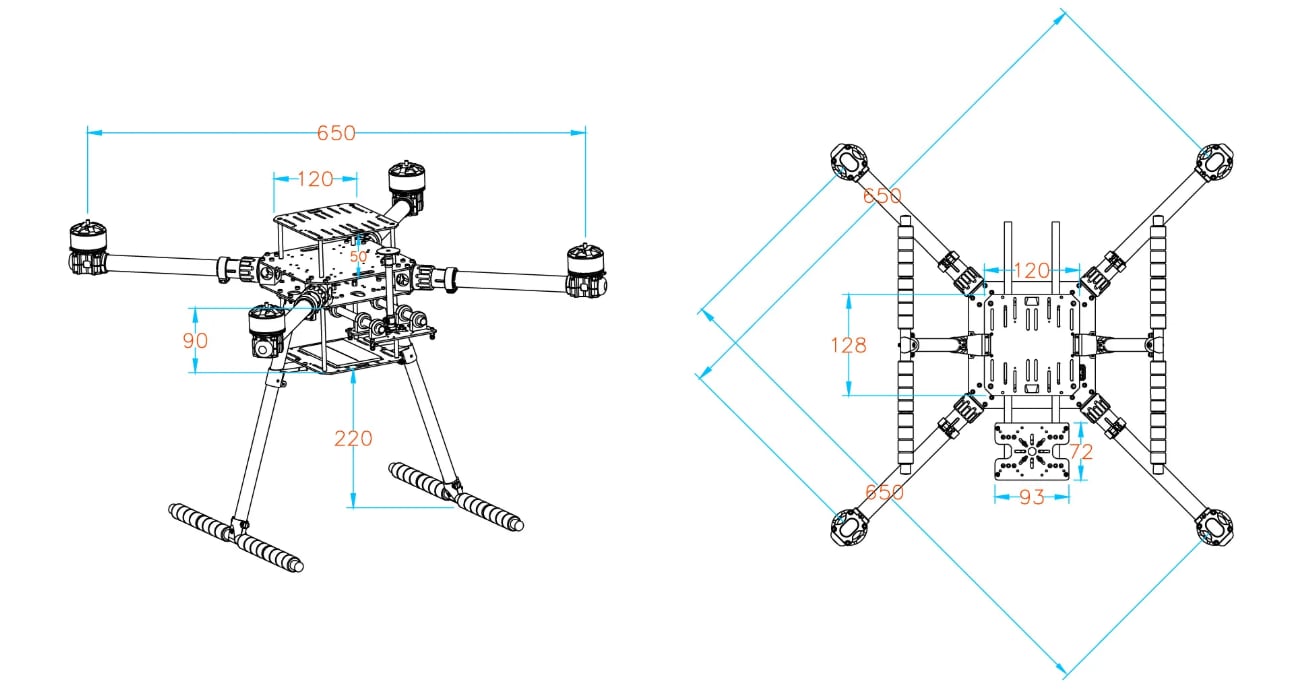
Q650-V1 제원



🚀
EditorPreview
Q650 사용 가이드
저작권: 쿼드(QUAD) 드론연구소 https://smartstore.naver.com/maponarooo
Q650 시리즈자율주행드론은 GPS가 수신되는 지상과 GPS가 수신되지 않는 지역(지하, 터널 등)에서 모두 사용할 수 있는 픽스호크(PX4) 기반의 다목적 자율주행 드론 입니다.
Q650 자율주행드론은 2가지의 비행 모드를 가지고 있습니다.
GPS 모드 + 자율주행기능(RealSense D435 – 옵션)
non-GPS VIO 모드 + 자율주행기능(RealSense D4xx – 옵션)
1. GPS 모드
GPS 모드에서 드론은 일반적인 픽스호크와 동일한 수동, 자동비행 모드의 비행 옵션을 지원하며, MAVSDK/MAVROS/ROS2 uORB를 통해 프로그래밍으로 드론을 오프보드(OFFBOARD) 모드로 제어할 수 있습니다.
또한, 자율비행 옵션 선택시 RealSense D4xx 계열의 심도 카메라를 이용하여 자율 회피 비행을 수행하는ROS2 기반의 V-SLAM 기반의 드론 개발에 용이 합니다.
2. Optical-Flow & LiDAR 모드
고성능 Optical-Flow와 LiDAR 센서를 이용해 GPS가 수신되지 않는 지역에서도 위치 비행 및 호버링이 가능 합니다.
3. non-GPS VIO 모드
non-GPS VIO 모드는 카메라 센서를 이용하여 VIO(Visual Innertial Odometry) 위치 비행이 가능 합니다. 따라서, 별도의 GPS 수신 없이도 드론은 자신의 위치를 파악하여 실내, 터널 등에서 자율 비행이 가능 합니다.
또한, 자율비행 옵션 선택시 RealSense D4xx 계열의 심도 카메라를 이용하여 자율 회피 비행을 수행하며, ROS2 기반의 실시간 SLAM 툴과 알고리즘을 이용하여 V-SLAM 기반의 드론 개발에 용이 합니다.
T265 카메라를 이용한 non-GPS VIO 모드는 ROS1 까지만 지원 합니다. (Intel RealSense T265 트래킹 카메라는 단종되어 더이상 판매하지 않습니다.)
4.360도 LiDAR 스캐너를 이용한 SLAM
Livox Mid-360과 같은 360도 LiDAR 스캐너를 이용하여 SLAM을이용한 VINS(Vision-INS) 기반의 자율비행을 가능하게 할 수 있습니다.
5. 시뮬레이터
Q650 드론은 PX4-SITL과 Gazebo 시뮬레이터를 이용하여 시뮬레이션 테스트를 수행할 수 있습니다.
Q650-V1 제원