
Q650 드론의 경우 GPS 모드로 기본 설정이 완료되어 출고 됩니다.
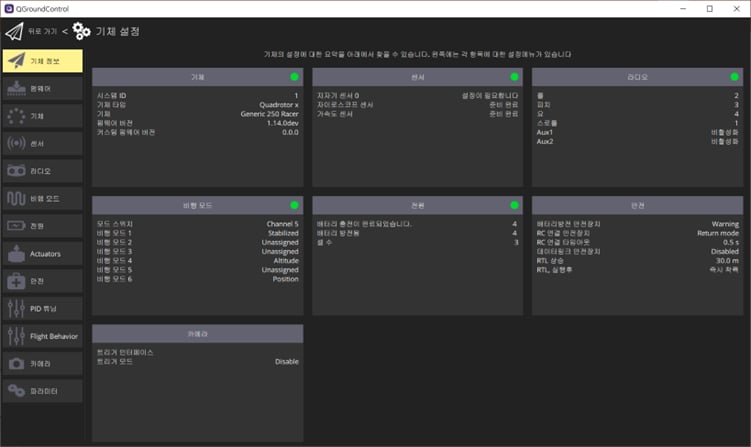
FC와 컴퓨터를 USB로 연결하면 QGC를 통해 설정 상태를 확인 할 수 있습니다.
파라메터 다운로드
Q500 드론의 기본 파라메터는 아래 링크에서 다운로드 할 수 있습니다.
파라메터는 GPS모드와 VIO모드 두가지 종류가 있으며 원하는 파라메터를 다운받아 QGC에서 로딩해 사용 하시면 됩니다.
파라메터는 기본 세팅만 맞춰져 있습니다. 고객 기체에 최적화는 직접 수행 하셔야 하며, 본사는 이에 대한 책임을 지지 않습니다.
https://drive.google.com/drive/folders/117A2T3JJKhx8aLlYgQL58u7mShkZXQqU?usp=drive_link



