
Radiomaster 조종기는 최초 사용시 수신기와 Binding을 하여야 합니다.
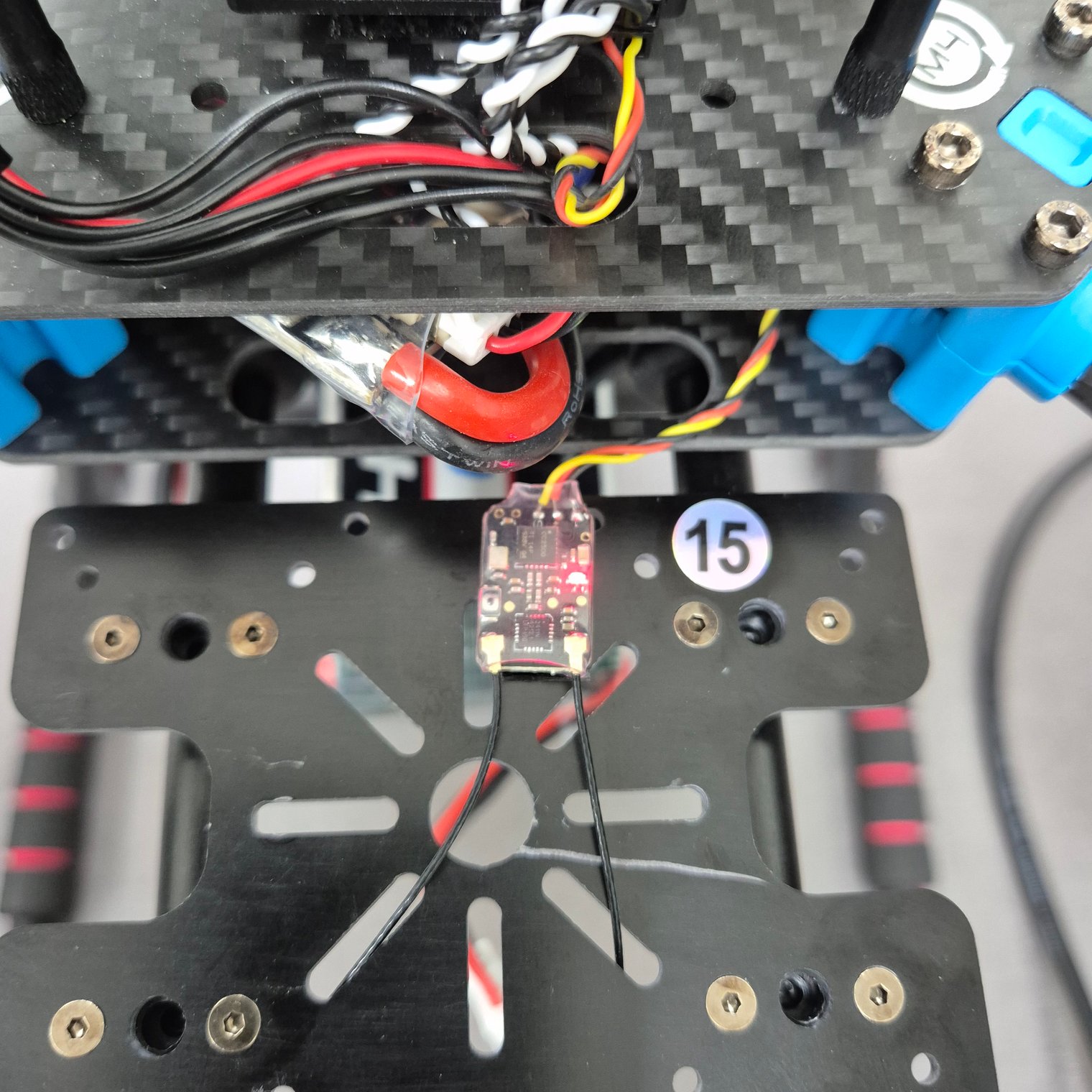
조종기와 수신기가 Binding이 한번완료 되면 수신기에 적색 LED가 켜집니다.
만약 수신기에 불이 켜지지 않는다면 Binding이 필요 합니다.
바인딩(Binding) 순서
- 드론에 배터리를 분리 합니다.
- 수신기 위에 바인딩스위치를 누른 상태에서 전원을 연결 합니다. 적색 LED가 점멸 상태로 바뀝니다.(Binding모드)
- 조종기에 모델 버튼을 누릅니다.
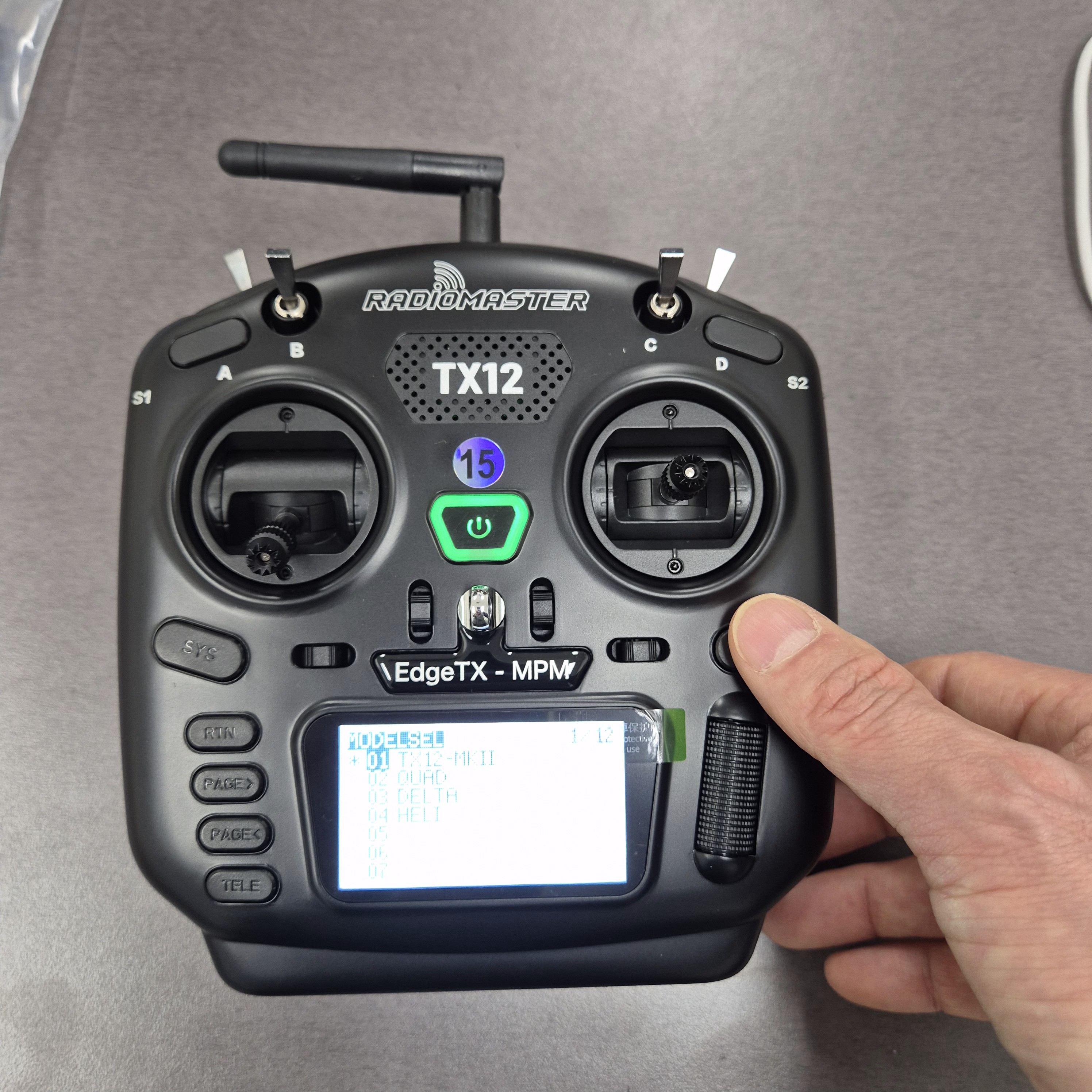
- 모델 메뉴에서 PAGE> 버튼을 누릅니다.

- FR 타입을 FrSky X로 선택후 Receiver BND에 커서를 위치하고 엔터를 누릅니다. (스크롤버튼)
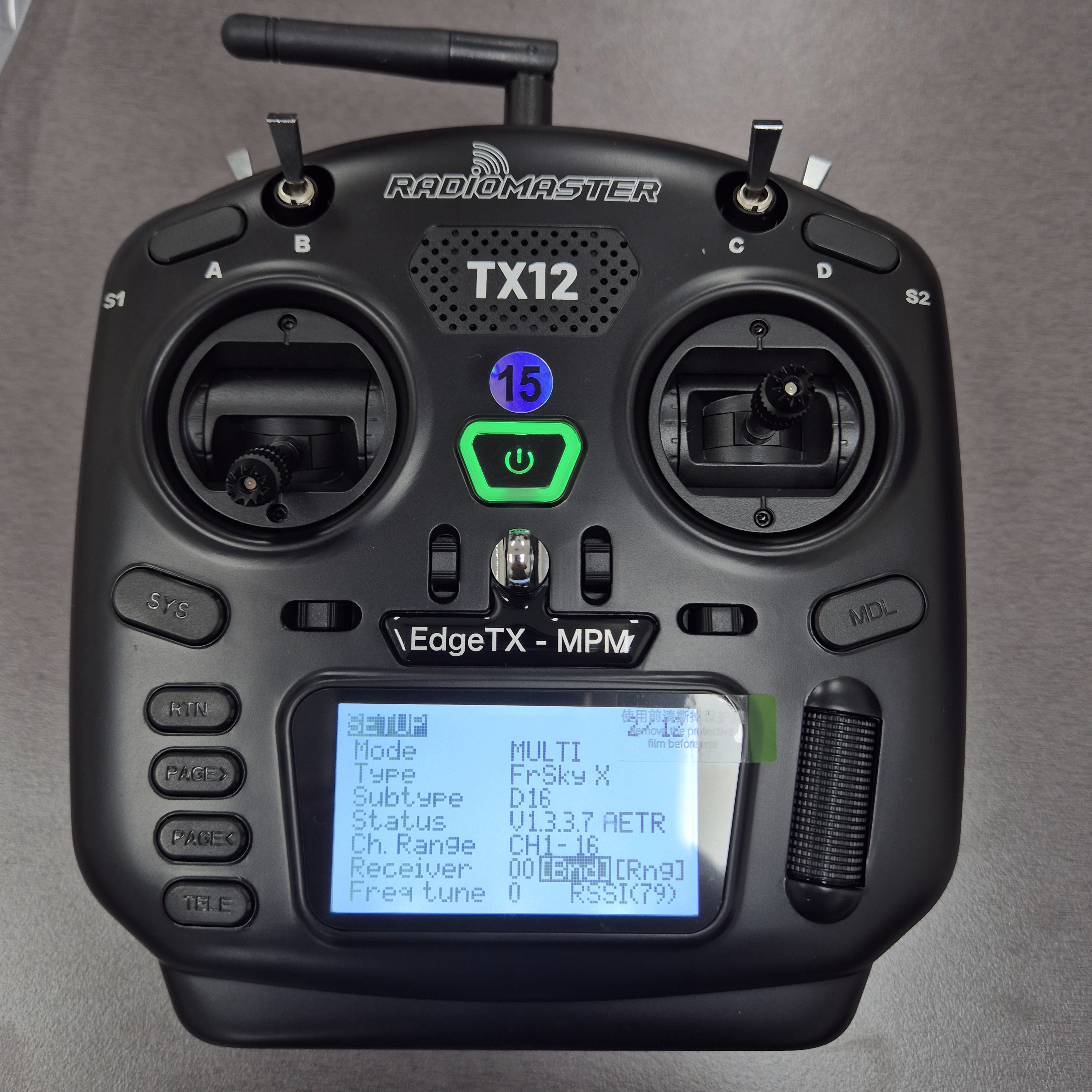
- 바인드 모드가 되면 수신기가 빠르게 점멸하며 Binding을 실시 합니다. 완료되면 솔리드 상태로 바뀝니다. (수신기와 조종기가 너무 가깝게 있으면 바인딩이 잘 되지 않으니 1m 이상 떨어뜨려서 바인드 하세요.)
- 이제 QGroundControl에서 조종기 칼리브레이션과 비행모드를 셋업후 비행 합니다.



