
[단계]
1. 부팅 가능한 USB 설치 프로그램 만들기
2. ISO 이미지 다운로드 하기
3. USB로 PC 부팅
4. 우분투 22.04 LTS 설치 및 환경 설정
1 단계: 부팅 가능한 USB 설치 프로그램은 아래의 링크에서 확인하세요~
Windows 용 설치 미디어 만들기 – Microsoft 지원
USB를 PC에 연결하고, 전원을 켜서 F2/F8/F10/DEL(제조사마다 다름) Key를 눌러 바이오스(BIOS/UEFI)로 들어가서 부팅 순서를 USB 부팅이 첫 번째로 변경하고 저장합니다.
2 단계: ISO 이미지 다운로드 하기
2-1. 아래의 우분투(Ubuntu) 공식 홈페이제 접속합니다.
2-1. 아래의 우분투(Ubuntu) 공식 홈페이제 접속합니다.
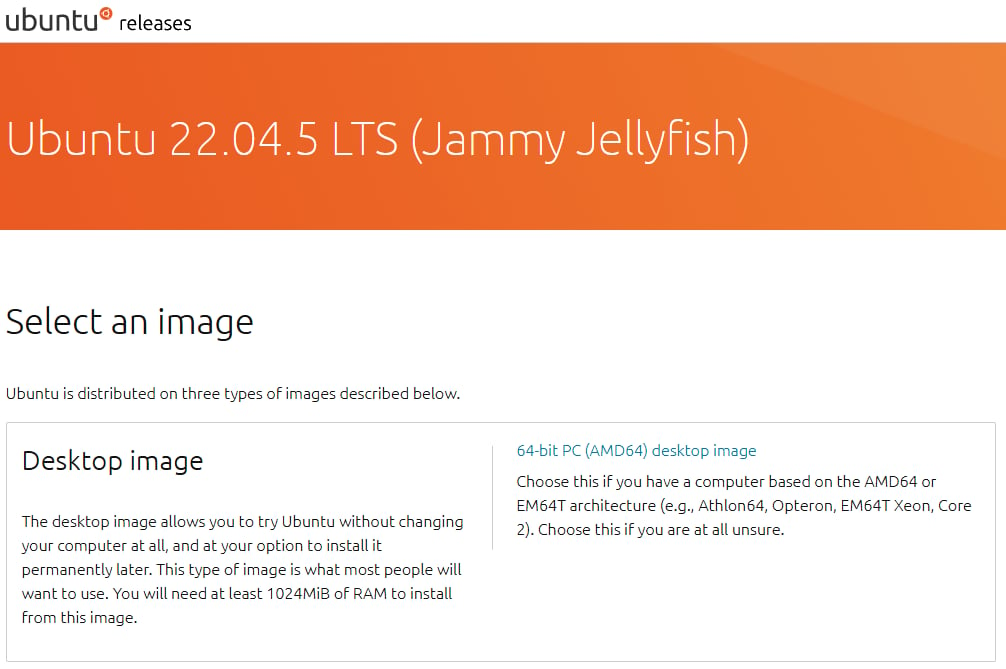
Ubuntu 22.04.5 LTS (Jammy Jellyfish)
2-2. 공식 홈페이지에 접속해서 64-bit PC (AMD64) desktop image 를 선택 합니다.
3. USB로 PC 부팅 후, 우분투 설치
3-1. 설치할 언어를 선택하고 오른쪽 [Install Ubuntu] 메뉴를 클릭합니다.

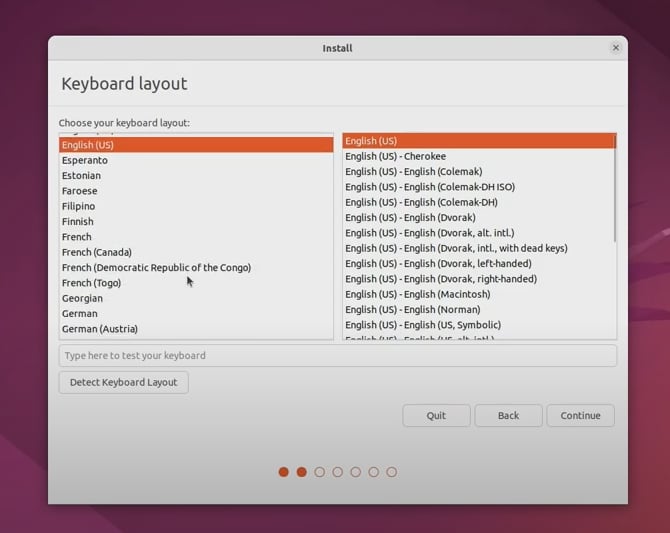
3-2. 키보드 레이아웃을 선택하고 오른쪽 [Continue] 버튼을 클릭합니다.
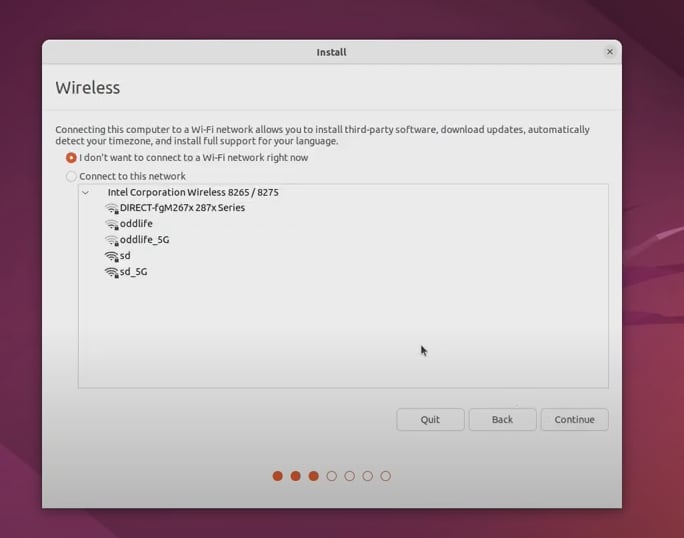
3-3. 무선인터넷을 접속할지 여부를 선택하고 [Continue]를 클릭합니다.
3-4. 소프트웨어 및 기타 소프트웨어서 일반 설치, 최소 설치로 선택 가능하고, 기타 설정을 체크하고 [Continue] 버튼을 클릭합니다.

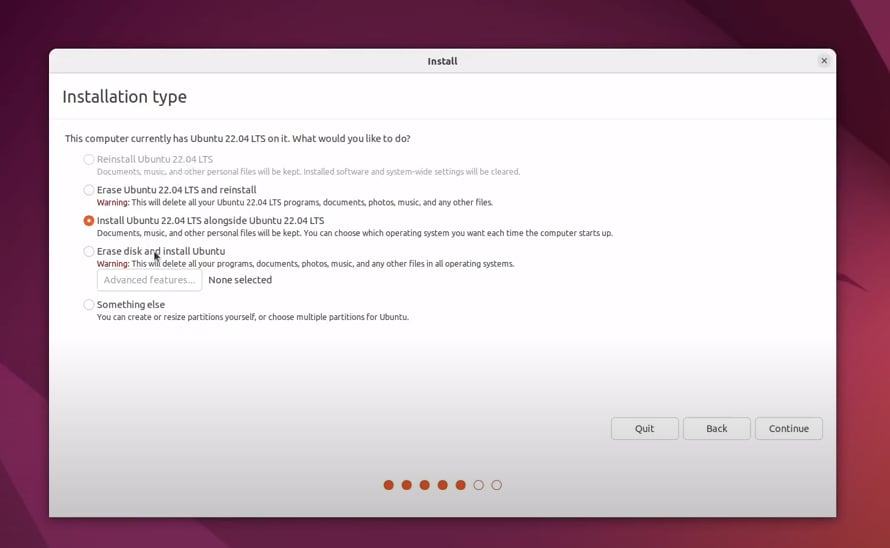
3-5. 설치 형식 화면에서 기존에 설치되어 있는 운영체제(OS)가 있을 경우 선택이 가능하고, 설치 디스크에 운영체제(OS)가 설치되어 있지 않을 경우 우분투(Ubuntu)로 선택하고 [Continue]를 클릭하여 설치 진행합니다.
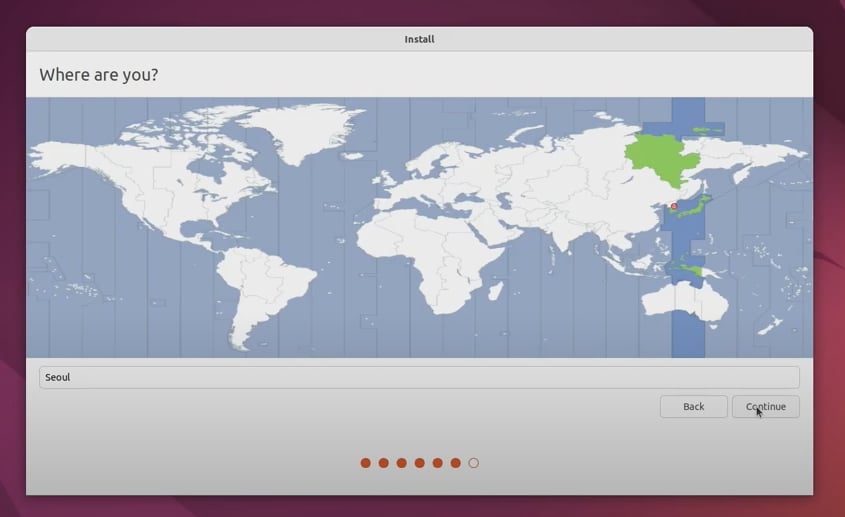
3-6. 거주하고 있는 지역을 선택하고 [Continue] 버튼을 클릭합니다.
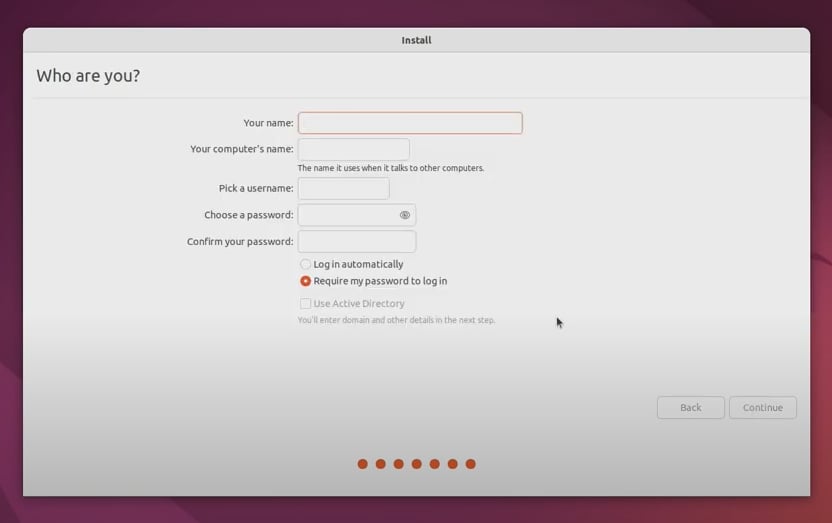
3-7. 이름, 컴퓨터 이름, 사용자 이름 선택, 암호 선택, 암호 확인을 작성하고 [Continue] 버튼을 클릭합니다.
3-8. 설치 화면에서 진행이 완료될 때까지 기다립니다.
| |

3-9. 진행이 완료되면 재부팅하여 사용하시면 설치가 마무리됩니다.
4. 우분투 22.04 LTS 설치 및 환경 설정
1. 사용자 계정 sudo 권한 할당 $sudo adduser {사용자 계정명} sudo
2. root 패스워드 설정 $sudo passwd root
3. 네트워크 설정을 위해 net-tools 설치
$sudo apt-get update
$sudo apt-get install net-tool4. ssh-server 설치
$sudo apt-get install openssh-server -y 5. ssh 서버 포트 설정
$sudo vim /etc/ssh/sshd_config
$sudo systemctl restart sshd
$ssh -p 12345 test@192.168.0.2


