수신기 배선 및 세팅 : 911 FALCON 프로젝트
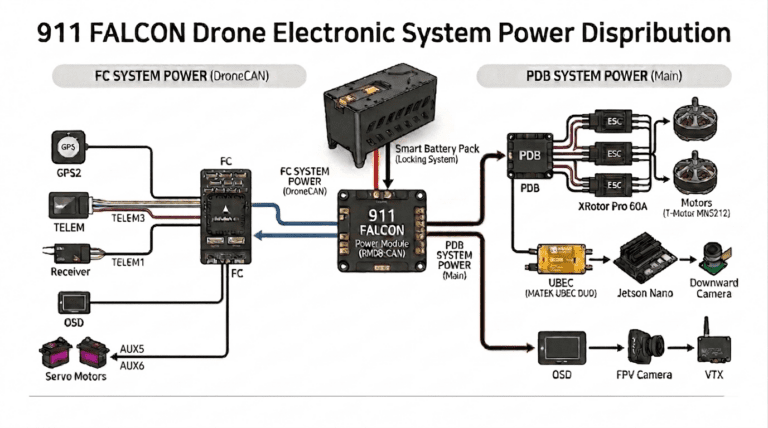
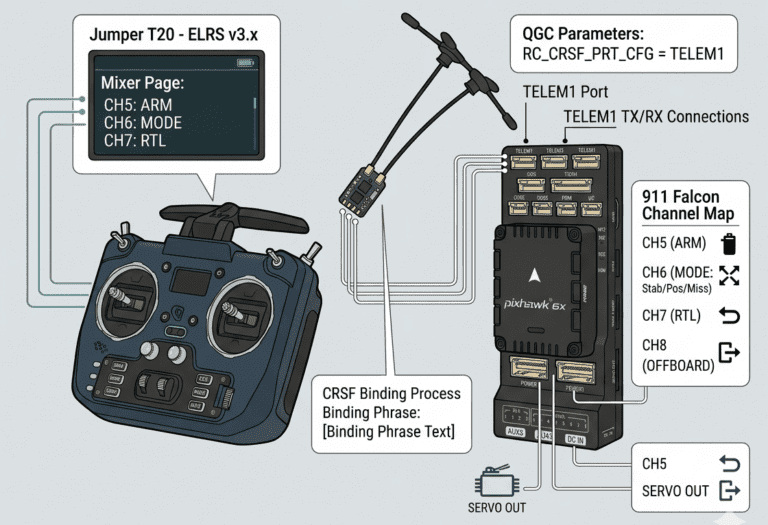
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다. 지난 편에서는 911 FALCON 드론의 전장 시스템 전체 전원 공급 흐름을 정리했습니다. 파워모듈을 기준으로 FC 계통과 PDB 계통 두 갈래로 나뉘어 각 부품에 전원이 공급되는 구조를 확인했습니다. 이번 편에서는 수신기 배선 및 세팅 과정을 다루겠습니다. 조종기 설정부터 수신기 배선·펌웨어 업데이트·바인딩, 그리고 FC에서의 파라미터 설정과 RC 캘리브레이션, 비행 모드 설정까지 순서대로…