-
Frame Design and Main Component Layout : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In the previous article, we reviewed the design process and component selection for the Control & Communication System of the 911 FALCON drone. We covered the selection criteria for key components including the Flight Controller and Companion Computer responsible for flight…
-
PX4 MAVSDK – C++ Programming [Part 12] Advanced Autonomous Flight Research Cases Using MAVSDK C++
Hello! This is QUAD Drone Lab. We have finally reached the end of our series on PX4 MAVSDK C++ programming. So far, we have built a solid foundation in autonomous flight—starting from the architecture of MAVSDK, receiving telemetry data, executing takeoff/landing (Action) and waypoint missions (Mission), and finally mastering precision Offboard control that issues commands…
-
PX4 MAVSDK – C++ Programming [Episode 11] Complete Comparison of MAVSDK vs MAVROS vs uXRCE-DDS
Hello! This is Aiden from the Marketing Team. In our previous episode, we explored how to enhance the reliability of autonomous flight software through custom logging and automated integration testing using gtest. By now, you have built a solid foundation for controlling drones using MAVSDK C++. However, when starting a serious autonomous drone project in…
-
PX4 MAVSDK – C++ Programming [Episode 10] Custom Logging and Integration Testing (gtest)
Hello! This is Aiden from the Marketing Team. In our previous sessions, we explored various methodologies for actual drone control, including Offboard mode. However, when developing real-world robotics software in university labs or corporate environments, you quickly realize that debugging and verifying system stability often takes much longer than writing the initial code. Due to…
-
PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode
Hello! I’m Aiden from the Marketing Team. In our previous series, we’ve covered receiving drone sensor data (Telemetry), performing basic Actions (takeoff/landing), and autonomous flight following multiple waypoints (Mission). However, to conduct advanced robotics research—such as camera-based (Vision) obstacle avoidance, AI target tracking, or multi-vehicle Swarm flight—simply following a pre-defined path is not enough. The…
-
PX4 MAVSDK – C++ Programming [Episode 7] Moving to a Specific Location (goto_location) and Understanding the Haversine Formula
Hello! This is Aiden from the Marketing Team. In our previous post (Part 6), we mastered the basic control loop—arming the drone using the Action API, taking off into the sky, and landing safely back on the ground. However, a robot that only moves up and down in one spot can hardly be called a…
-
PX4 MAVSDK – C++ Programming [Episode 6] Basic Flight Control using Action API
Hello! This is Aiden from the Marketing Team. In our previous episode, we explored the “nervous system” of a drone—the Telemetry plugin—and learned how to receive the aircraft’s current status and GPS location via asynchronous callbacks. Now that we’ve successfully retrieved sensor data, it’s finally time to command physical movement! In autonomous flight robotics research,…
-
Drone Component Selection – Control & Communication Section : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In the previous article, we covered the design and component selection process for the power system of the 911 FALCON drone. Based on the power requirements of the propulsion system, we determined the battery capacity, selected a power module and PDB…
-
PX4 MAVSDK – C++ Programming [Episode 5] Querying System Information and Using Telemetry
Hello! I’m Aiden from the Marketing Team. In our last post (Part 4), we covered setting up CMake in an empty project and connecting a communication channel to perform “System Discovery.” So, what’s next? It is time to understand the drone’s current status: What is the battery level? Where is it located (GPS)? For researchers…
-
[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection
Hello! This is Aiden from the Marketing Team. In our previous episode (Part 3), we built a SITL virtual environment for safe autonomous flight testing and ran basic MAVSDK examples to see our drone take off in virtual space. However, as a researcher or developer, simply running pre-made examples isn’t enough, right? In this Part…
-
[PX4 Tuning Series Appendix] Racing Drone Tuning Guide (Racer Setup): Unlocking Extreme Performance
Hello once again to all university students, graduate students, and researchers dedicating yourselves to aerospace engineering and autonomous drones! From [Series 1] through [Series 7], we have covered the entire process of optimizing the flight performance and safe landing of a standard research multicopter. However, if your research goal goes beyond simply “hovering stably” and…
-
[PX4 Tuning Series 7] Land Detector Configuration: The Essential Guide for a Perfect Flight Conclusion
Hello once again to all university students, graduate students, and researchers dedicating yourselves to aerospace engineering and autonomous drones! We have finally arrived at the concluding chapter of our extensive PX4 tuning guide. From [Series 1] to [Series 6], we have successfully eliminated physical hardware vibrations, optimized sensor filters through high-rate logging, performed manual and…
-
PX4 MAVSDK – C++ Programming [Part 3] Installing MAVSDK C++ and Setting Up the SITL Simulation Environment
Hello! This is QUAD Drone Lab. In our previous post (Part 2), we explored the core C++ syntax essential for handling MAVSDK C++, including pointers, references, lambda functions, and templates. Having solidified our theoretical background, it is now time to create the “playground” where our code will actually run. Testing drone control code developed in…
-
PX4 MAVSDK – C++ Programming [Part 2] Core C++ Syntax for MAVSDK
Hello! I am Aiden from the QUAD Drone Lab marketing team. In our previous post, we explored the significance of MAVSDK in autonomous flying robot systems and its general architecture. Before we dive into writing code to control drones, we need to touch upon our primary tool: C++. For students or researchers accustomed to scripting…
-
[PX4 Tuning Series 6] Trajectory Generator and Setpoint Tuning: The Art of Flight Feel and Smooth S-Curves
Hello once again to all university students, graduate students, and researchers dedicating yourselves to aerospace engineering and autonomous drones! Welcome to the sixth and final installment of our comprehensive PX4 Tuning Series. From [Series 1] through [Series 5], we have covered a massive amount of ground. We started by physically eliminating hardware vibrations, moved on…
-
[PX4 Tuning Series 5] The Magical 40 Seconds: Everything You Need to Know About Auto-Tuning
Hello to all university students, graduate students, and researchers dedicating yourselves to aerospace engineering and autonomous drones! Thank you for following along so diligently from [Series 1] all the way to [Series 4]. So far, we have physically eliminated hardware vibrations, tuned filters via high-rate logging, and manually dissected the principles of PID controllers to…
-
PX4 MAVSDK – C++ Programming [Part 1] Library Overview and Architecture
Hello! I’m Aiden from the Marketing Team. Today, we will be diving into PX4 Autopilot, the world’s most widely used open-source flight control stack, and MAVSDK C++, the essential library for controlling drones from a Companion Computer. In this first session, before we get our hands dirty with code, we’ll cover the background, communication protocols,…
-
[Series Guide] Everything About PX4 MAVSDK C++ Programming
Hello to all undergraduate and graduate students, as well as researchers interested in autonomous flight robot research and drone software development. While drones in the past were simple flying machines dependent on manual pilot operation, today’s Unmanned Aerial Vehicles (UAVs) have evolved into “high-level autonomous flight robots” that plan their own paths and avoid obstacles…
-
[PX4 Tuning Series 4] Advanced PID Tuning and Flight Optimization: The Hidden 1% to Unlock Extreme Flight Performance
Hello again to all university students, graduate students, and researchers dedicating yourselves to aerospace engineering and autonomous drones! In our previous [Series 3], we covered the fundamentals of manual PID tuning, focusing on how quickly and accurately the vehicle reacts to stick inputs while hovering. If you followed the basic tuning procedures, your drone should…
-
[PX4 Tuning Series 3] Manual PID Tuning for Beginners: Achieving Perfect Harmony with Your Drone
Hello again to all university students, graduate students, and researchers dedicating yourselves to the study of aerospace engineering and autonomous drones! Through [Series 1] and [Series 2], we eliminated mechanical play in our hardware, minimized control latency, and successfully completed “Filter Tuning” by analyzing flight logs to block out vibrations. Now, your drone is in…
-
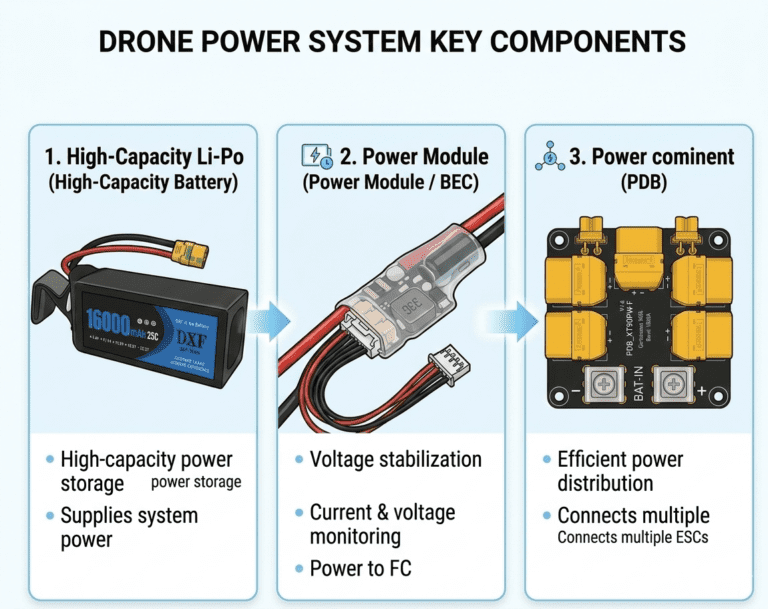
Drone Component Selection – Power System : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In the previous post, I introduced the propulsion system selection process for the 911 FALCON drone. Using the mission requirements as fixed KPIs, I explained how the frame and propeller class, target AUW, motor, ESC, and battery were progressively refined through…
-
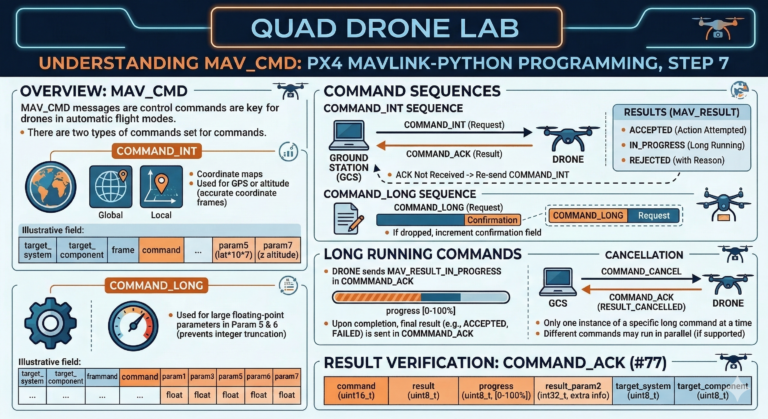
PX4 MAVLink-Python Programming: 7. MAV_CMD
Hello, I’m Aiden from the Marketing Team. Today, I would like to introduce the 7th step of PX4 MAVLINK-PYTHON programming: MAV_CMD. This content is registered as the copyrighted property of our QUAD Drone Lab, so please refrain from unauthorized distribution. MAV_CMD OVERVIEW MAV_CMD Messages is a list of control commands that can be issued to…
-
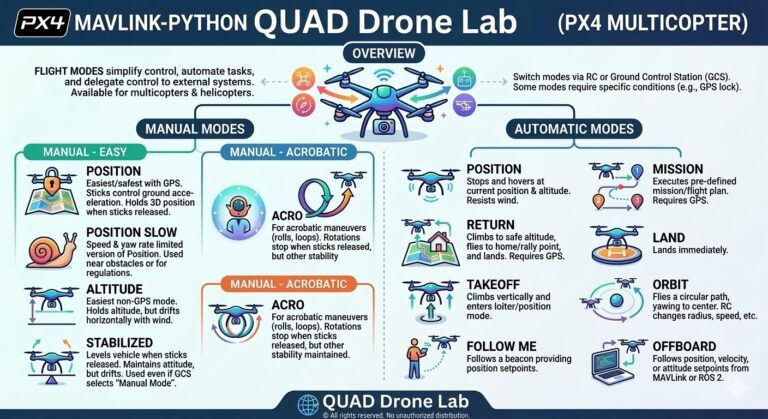
PX4 MAVLink-Python Programming: 6. Flight Modes (PX4 Multicopter)
Hello, this is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming – Flight Modes (PX4 Multicopter). Please note that this content is the registered copyright of QUAD Drone Lab, and we kindly ask you to refrain from unauthorized distribution. Flight modes support autopilot features to make it easier to manually control…
-
[Reference] What is HMAC-SHA256?
Hello, this is Aiden from the Marketing Team. Following our discussion on PX4 MAVLink-Python Programming: MAVLink 2 Message Signing, today we will take a closer look at HMAC-SHA256. This content is the copyrighted intellectual property of QUAD Drone Lab. Please refrain from unauthorized distribution. ✳️ HMAC = Hash-based Message Authentication Code HMAC is a specific…
-
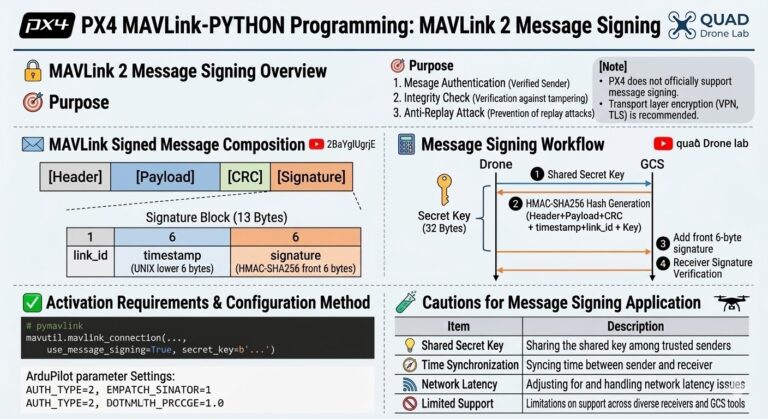
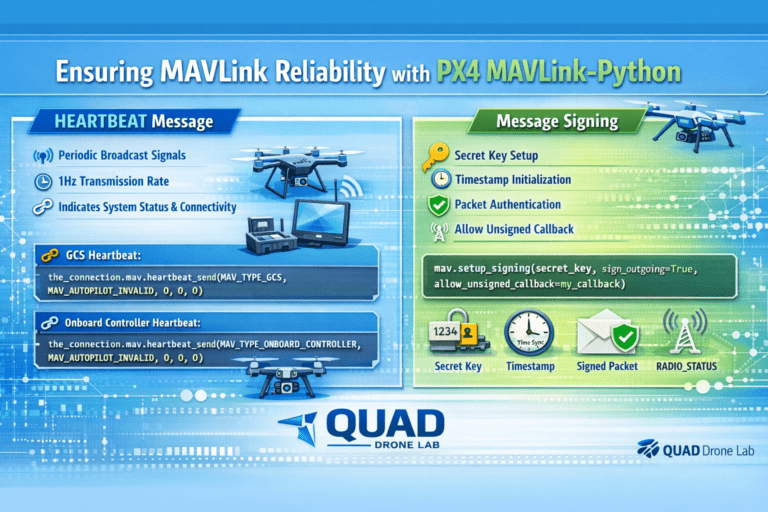
PX4 MAVLink-Python Programming: 5. Ensuring MAVLink Reliability
Hello. This is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming, specifically focusing on Ensuring MAVLink Reliability. Please note that this content is registered under the copyright of our QUAD Drone Research Institute, and we kindly ask you to refrain from unauthorized distribution. HEARTBEAT All MAVLink components must periodically…
-
[PX4 Tuning Series 2] Catching Hidden Vibrations and Filter Tuning: Finding the Perfect Compromise Between Control Latency and Noise
Hello again to all university students, graduate students, and researchers dedicating yourselves to the study of autonomous drones and aerospace engineering! In our previous [Series 1], we covered the essential hardware preparation steps, such as using high-quality frames and moving motor wires to the AUX pins to physically minimize control latency. We also activated the…
-
[PX4 Tuning Series 1] The First Step: Perfect Hardware Preparation and Understanding Control Latency
Hello to all university students, graduate students, and researchers dedicating your days and nights to aerospace engineering and autonomous drones! To help you navigate through the complex formulas and massive codebases you wrestle with daily, we are launching the “PX4 Tuning Blog Series,” based on practical flight tests and intuitive data analysis. For the custom…
-
[Series Announcement] The Ultimate Guide to PX4 Tuning for Drone Researchers and Students
Hello to all university students, graduate students, and researchers working tirelessly on autonomous drones in the lab! Have you ever spent hours building a custom drone for your research, only to find it doesn’t fly as you intended? You’ve probably experienced ruined flight tests due to unexplained vibrations, twitching, or unstable hovering. PX4 is an…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 12]: Troubleshooting Guide and Logging Techniques
Hello once again, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the twelfth installment of QUAD Drone Lab’s MAVSDK-Python blog series. Up until now, we have systematically mastered the core and flashy features required to implement autonomous flight—ranging from precise position/velocity control via OFFBOARD mode to manual…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 11]: Creating Manual Drone Control via Keyboard Inputs
Hello once again, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the eleventh installment of QUAD Drone Lab’s MAVSDK-Python blog series. Up until [Part 10], we deeply explored the core principles of autonomous flight, such as position control, velocity control, and feed-forward simultaneous control, where the drone…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 10]: Enhancing Target Reaching Efficiency with Feed-Forward Simultaneous Control
Hello and welcome back, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the grand tenth installment of our MAVSDK-Python blog series. Throughout [Part 8] and [Part 9], we deeply explored Position Control, which commands the vehicle to move to specific coordinates, and Velocity Control, which dictates the…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 9]: OFFBOARD Velocity Control (Based on BODY and NED Frames)
Hello and welcome back, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the ninth installment of our MAVSDK-Python blog series. In our last session, [Part 8], we learned about Offboard Position Control, which commands the vehicle to move to specific coordinates (NED). However, position control alone has…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 8]: OFFBOARD Position Control (Based on NED Frame)
Hello once again, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the eighth installment of our MAVSDK-Python blog series. In our last session, [Part 7], we built a solid theoretical foundation regarding the communication principles of ‘OFFBOARD Mode’—the absolute core of drone control—along with its three essential…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 7]: Understanding the Core Principles of OFFBOARD Mode
Hello once again, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the seventh installment of our MAVSDK-Python blog series. So far, we have mastered the basic classes of MAVSDK, understood asynchronous (asyncio) programming, and learned how to make a drone take off, land, and fly to designated…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 6]: Analyzing MAVSDK-Python Basic Sample Programs
Hello and welcome back, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the sixth installment of our MAVSDK-Python blog series. In Part 5, we successfully navigated the biggest programming hurdle: understanding Python’s asynchronous programming (asyncio) syntax from the perspective of drone control. Now, we have acquired both…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 5]: Complete Understanding of Python ‘asyncio’ for MAVSDK Control
Hello and welcome back, university students and researchers dedicating yourselves to autonomous flight robotics and drone control algorithms! Welcome to the fifth installment of our blog series. In Part 4, we explored the core classes of MAVSDK, such as System, Action, Telemetry, and Offboard, which are used to issue specific commands to the drone. While…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 4]: Exploring Key Classes in the MAVSDK Library
Hello once again, university students and researchers diving deep into the world of autonomous flight research and drone application development! In Part 3, we successfully navigated the somewhat tricky but crucial infrastructure setup by building the MAVSDK Server for remote control. Now that our communication environment is perfectly established, it is time to learn what…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 3]: Building the MAVSDK Server for Remote Communication
Hello again, university students and researchers dedicating yourselves to autonomous flight control and drone application development! Welcome back. Up until our last session, we familiarized ourselves with the basic concepts of MAVSDK-Python and executed a simple warm-up code to make a drone take off in a local environment. However, let’s imagine a real-world lab environment…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 2]: Setting up the MAVSDK-Python Development Environment
Hello again, university students and researchers dedicating your time to autonomous flight research and drone application development! In Part 1, we briefly explored the concepts of MAVSDK and the basic prerequisites for programming. Last time, we installed the package with a simple pip3 install mavsdk command and made a virtual drone take off. However, in…
-
The Ultimate Guide to MAVSDK-Python Programming [Part 1]: Introduction to MAVSDK and Programming Prerequisites
Hello and welcome, university students and researchers interested in the exciting field of autonomous drone control and application development! When conducting drone research, moving beyond manually flying a drone with a remote controller is essential. Eventually, you will need to write custom code to issue commands, retrieve real-time telemetry data, and execute complex autonomous missions….
-
[PX4 ROS 2 Programming] Part 5: Advanced Techniques (Service Servers and Multi-Vehicle Simulation)
Hello again, university students and researchers delving into autonomous flight robotics and drone swarm systems! It is a great pleasure to have you back. In Part 4, we explored the highlight of flight control: “Offboard Control.” We wrote a C++ node in ROS 2 to arm the drone and make it take off to a…
-
[PX4 ROS 2 Programming] Part 4: Offboard Control (Drone Position and Trajectory Control)
Hello again, university students and researchers pioneering autonomous flight robotics! It is great to have you back. In Part 3, we tested our communication network by writing basic Listener (Subscriber) and Advertiser (Publisher) nodes to exchange data between ROS 2 and PX4. Now that we have confirmed the system’s pulse is beating steadily, it is…
-
[PX4 ROS 2 Programming] Part 3: Writing Basic ROS 2 Nodes (Listener & Advertiser)
Hello again, future developers and researchers fascinated by robotics and autonomous flight systems! Welcome back. In Part 2, we deeply explored three core concepts you must understand before writing any code: QoS (Quality of Service), Coordinate Frames, and Time Synchronization. Now that you know how to avoid the “walls of despair” like communication latency or…
-
[PX4 ROS 2 Programming] Part 2: Essential Precautions for ROS 2 Programming (QoS, Coordinate Frames, and Time Sync)
Hello and welcome back, robotics and autonomous flight enthusiasts! In Part 1, we explored the concepts of the newly introduced uXRCE-DDS middleware and successfully built the ROS 2 Humble and PX4 workspaces in an Ubuntu 22.04 environment. If you have successfully set up your environment, it is time to write some C++ code and start…
-
[PX4 ROS 2 Programming] Part 1: Understanding PX4-ROS 2 Architecture and Environment Setup
Integrating PX4 with ROS 2 is an essential process in the robotics field for implementing drone autonomous flight or computer vision-based control. In this post, we will understand the architecture of how PX4 and ROS 2 communicate and build a simulation development environment where you can run actual code. I have organized this with core…
-
NVIDIA Isaac ROS: The Essence of Visual Perception Technology Transcending the Limits of Autonomous Navigation
1. Introduction: Deterministic State Estimation in Unstructured Environments The success of autonomous navigation in robotics research depends on how precisely a robot can estimate its state on non-idealized, non-static manifolds. However, real-world environments differ significantly from controlled laboratory settings. Stochastic sensor noise, accumulating drift, and computational latency—which undermines the determinism of real-time control loops—pose formidable…
-
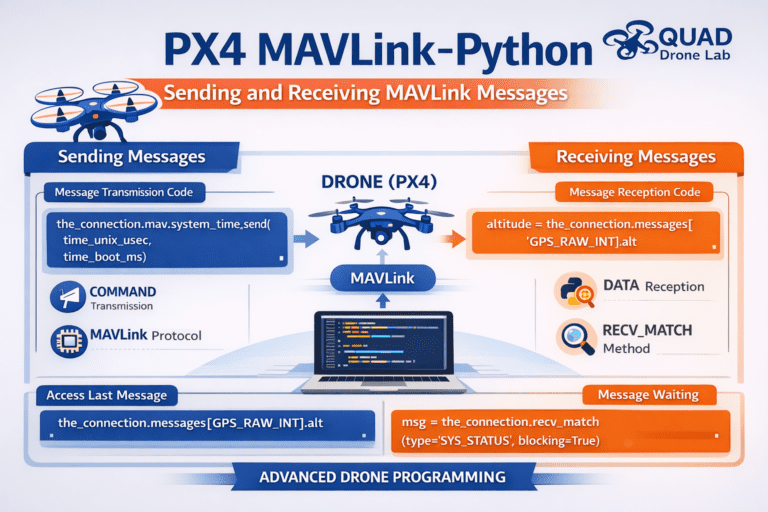
PX4 MAVLink-Python Programming : 3. Connecting to the drone
Hello! This is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python programming, specifically focusing on how to ‘Connect’ to a drone. Please note that this content is copyrighted by QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. Connecting to a drone Overview The mavutil module…
-
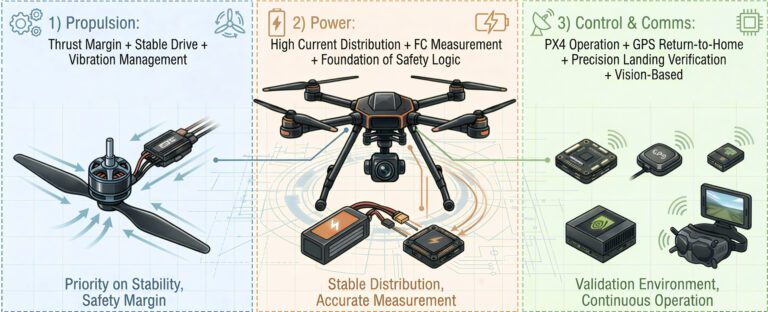
Drone Component Selection – Propulsion System : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In Week 2, I organized the communication system architecture of 911 FALCON, including the GPS-based return-destination update structure.Starting from Week 3, before moving into fabrication, I’ll document the airframe component selection process by subsystem. Since it’s too extensive to cover in…
-
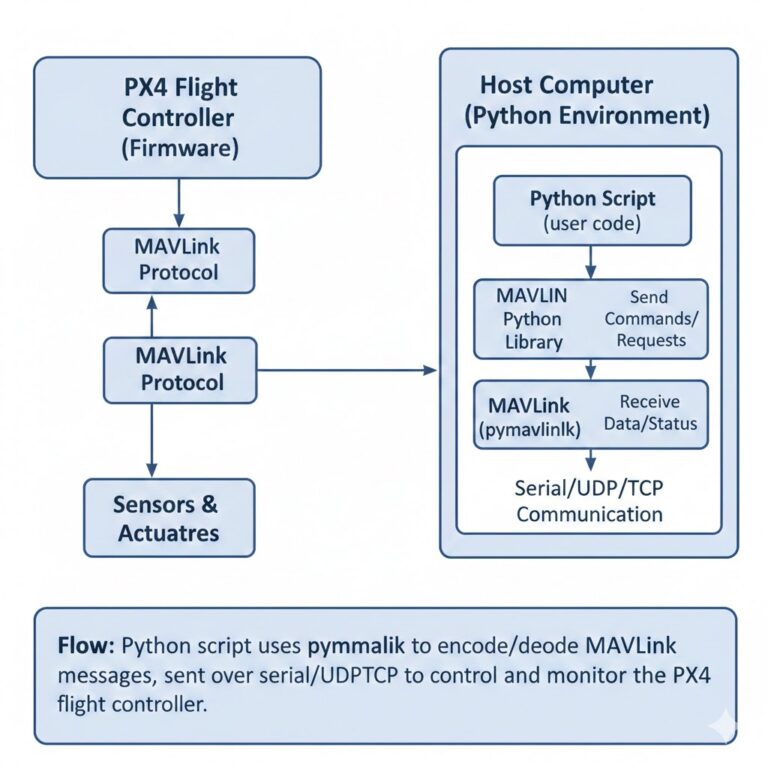
PX4 MAVLink-Python Programming: 2. Using Python MAVLink Libraries
Hello, this is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming, specifically focusing on the use of Python MAVLink libraries. Please note that this content is copyrighted by QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. Using Python MAVLink Library Overview The pymavlink package…
-
PX4 MAVLink-Python Programming: 1. MAVLink Overview
MAVLINK Overview Hello, this is Aiden from the marketing team. Today, I will be introducing PX4 MAVLink-Python Programming, starting with an overview of MAVLink. This content is the registered intellectual property of QUAD Drone Research Lab. We kindly request that you do not distribute it without prior authorization. YouTube Tutorial Please follow the steps below…
-
Setting up the PX4 Development Environment – Using the Gazebo Simulator
Hello. This is Aiden from the Marketing Team. Today, I would like to introduce setting up the PX4 development environment, specifically focusing on using the Gazebo simulator. Please note that this content is copyrighted by QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. Using the Gazebo Simulator Please proceed with…
-
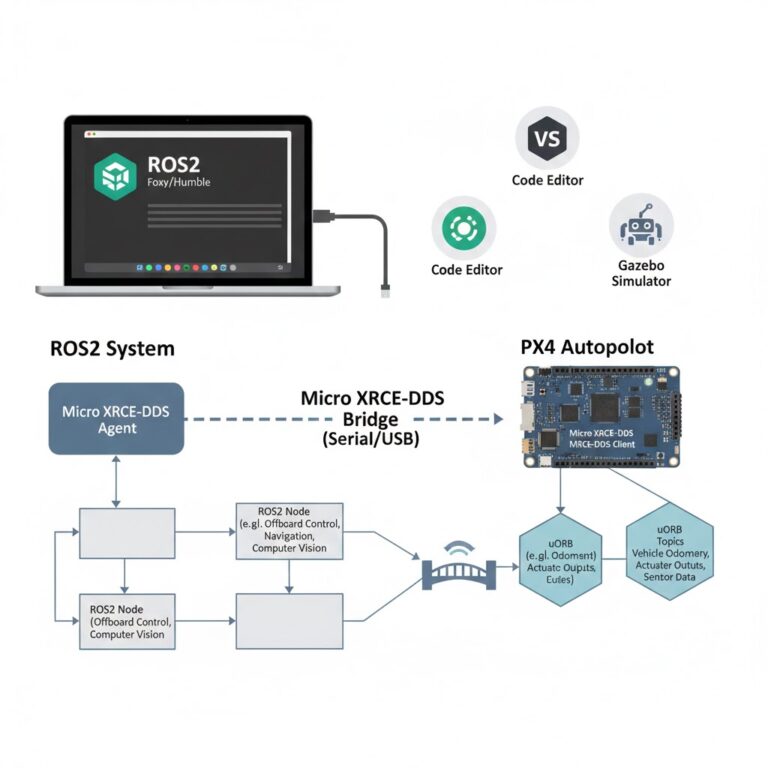
Setting Up PX4 Development Environment – ROS2 + PX4 Toolchain
Hello! I am Aiden from the marketing team. Today, I would like to introduce the PX4 development environment setup, specifically the ROS2 + PX4 Toolchain configuration. Please note that this content is registered under the copyright of our QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. ROS2 + PX4 Toolchain…
-
Setting Up PX4 Development Environment – Using Gazebo Classic Simulator
Hello. This is Aiden from the Marketing Team. Next, I would like to introduce the setup of the PX4 development environment, specifically focusing on how to use the Gazebo Classic simulator. Please note that this content is registered under the copyright of the QUAD Drone Lab, and we kindly ask you to refrain from unauthorized…
-
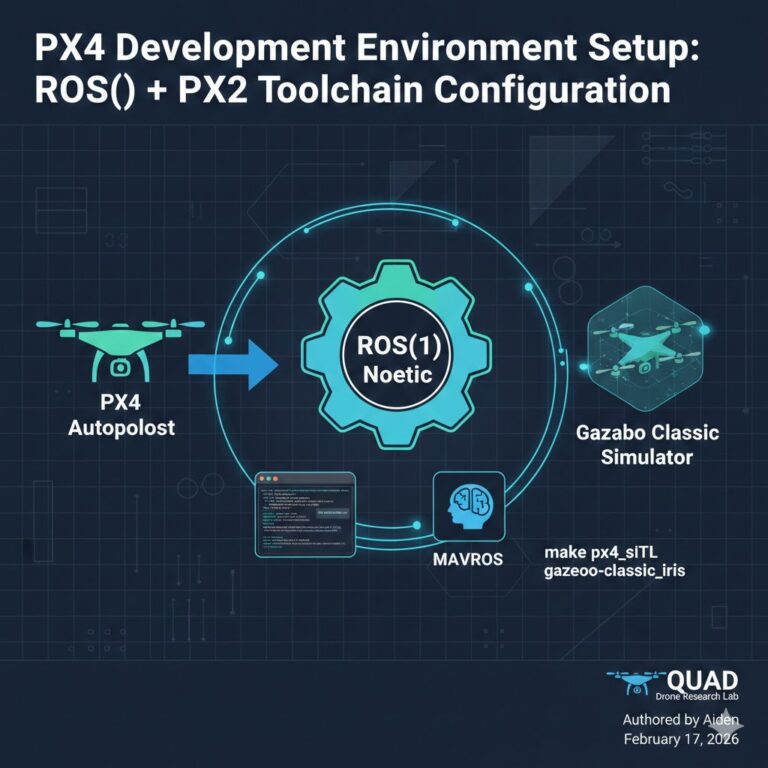
Setting Up PX4 Development Environment – Configuring ROS(1) + PX4 Toolchain
Hello. This is Aiden from the Marketing Team. his time, I would like to introduce the configuration of the PX4 development environment, specifically focusing on the ROS(1) + PX4 Toolchain setup. Please be advised that this content is the registered intellectual property of QUAD Drone Lab, and we kindly ask that you refrain from any…
-
Setting Up PX4 Development Environment – Installing WSL2 on Windows 10/11
Hello, this is Aiden from the Marketing Team. Today, I would like to introduce how to set up the PX4 development environment, specifically focusing on the installation of WSL2 on Windows 10/11. Please note that this content is the registered intellectual property of QUAD Drone Lab. We kindly ask that you refrain from any unauthorized…
-
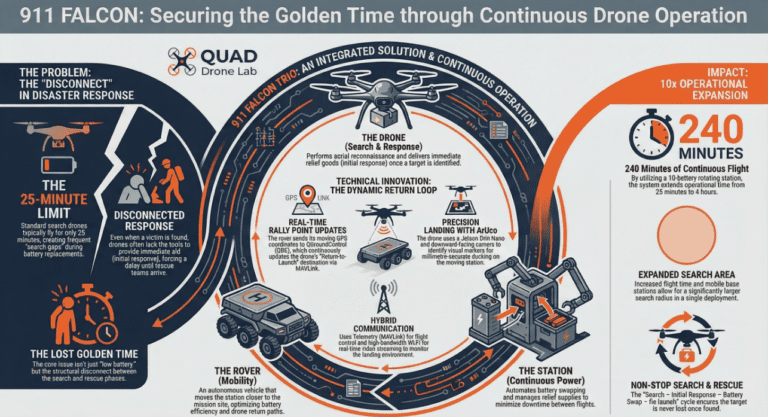
System Communication Architecture for Search-Drone Return : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In Week 1, I summarized the background behind launching the 911 FALCON project and outlined the operational concept we designed to address field limitations—namely short flight time and the lack of immediate response capability.In Week 2, I will introduce the system…
-
The Optimal Platform for Next-Generation AI and V-SLAM Research: In-depth Analysis of QUAD Q250-V3
Hello, I am Hyun-soo Ha, a researcher at QUAD Drone Lab. Today, I would like to introduce the Q250-V3 Autonomous Drone Platform, designed to save researchers’ valuable time and allow them to focus solely on their core research achievements. 1. Introduction: Key Challenges in Modern UAV Research and the Necessity of a Platform Today, Unmanned…

![PX4 MAVSDK – C++ Programming [Part 12] Advanced Autonomous Flight Research Cases Using MAVSDK C++](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인프그래피2-768x429.jpg)
![PX4 MAVSDK – C++ Programming [Episode 11] Complete Comparison of MAVSDK vs MAVROS vs uXRCE-DDS](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인포그래피-768x512.png)
![PX4 MAVSDK – C++ Programming [Episode 10] Custom Logging and Integration Testing (gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)
![PX4 MAVSDK – C++ Programming [Episode 7] Moving to a Specific Location (goto_location) and Understanding the Haversine Formula](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0317_인포-768x512.png)
![PX4 MAVSDK – C++ Programming [Episode 6] Basic Flight Control using Action API](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0316_인포그래피-768x512.png)

![PX4 MAVSDK – C++ Programming [Episode 5] Querying System Information and Using Telemetry](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0315_인포그래피-768x512.png)
![[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)
![[PX4 Tuning Series Appendix] Racing Drone Tuning Guide (Racer Setup): Unlocking Extreme Performance](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)
![[PX4 Tuning Series 7] Land Detector Configuration: The Essential Guide for a Perfect Flight Conclusion](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)
![PX4 MAVSDK – C++ Programming [Part 3] Installing MAVSDK C++ and Setting Up the SITL Simulation Environment](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Part 2] Core C++ Syntax for MAVSDK](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0312_인포그래픽-768x768.jpg)
![[PX4 Tuning Series 6] Trajectory Generator and Setpoint Tuning: The Art of Flight Feel and Smooth S-Curves](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Trajectory-Comparison-768x429.png)
![[PX4 Tuning Series 5] The Magical 40 Seconds: Everything You Need to Know About Auto-Tuning](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Mastering-Drone-Auto-tuning-768x429.png)
![PX4 MAVSDK – C++ Programming [Part 1] Library Overview and Architecture](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0309_인포그래픽-768x419.jpg)
![[Series Guide] Everything About PX4 MAVSDK C++ Programming](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0310_인포그래픽-1-768x419.jpg)
![[PX4 Tuning Series 4] Advanced PID Tuning and Flight Optimization: The Hidden 1% to Unlock Extreme Flight Performance](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Rate-Controller-PID-Architecture-768x429.png)
![[PX4 Tuning Series 3] Manual PID Tuning for Beginners: Achieving Perfect Harmony with Your Drone](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Multicopter-Cascaded-PID-Control-Architecture-768x429.png)
![[Reference] What is HMAC-SHA256?](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0308_사진-768x419.jpg)
![[PX4 Tuning Series 2] Catching Hidden Vibrations and Filter Tuning: Finding the Perfect Compromise Between Control Latency and Noise](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Low-Pass-Versus-Notch-Filters-768x429.png)
![[PX4 Tuning Series 1] The First Step: Perfect Hardware Preparation and Understanding Control Latency](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Flight-Controller-Latency-Pipeline-Diagram-768x429.png)
![[Series Announcement] The Ultimate Guide to PX4 Tuning for Drone Researchers and Students](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/PX4-Multicopter-Optimization-and-Tuning-Guide-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 12]: Troubleshooting Guide and Logging Techniques](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Software-Error-Handling-Comparison-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 11]: Creating Manual Drone Control via Keyboard Inputs](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-RC-Stick-Input-Mapping-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 10]: Enhancing Target Reaching Efficiency with Feed-Forward Simultaneous Control](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Feed-Forward-Drone-Navigation-Control-Comparison-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 9]: OFFBOARD Velocity Control (Based on BODY and NED Frames)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-3-768x543.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 8]: OFFBOARD Position Control (Based on NED Frame)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-2-768x545.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 7]: Understanding the Core Principles of OFFBOARD Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Offboard-Drone-Communication-Architecture-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 6]: Analyzing MAVSDK-Python Basic Sample Programs](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-768x420.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 5]: Complete Understanding of Python ‘asyncio’ for MAVSDK Control](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Synchronous-vs-Asynchronous-Drone-Processing-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 4]: Exploring Key Classes in the MAVSDK Library](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Software-Development-Guide-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 3]: Building the MAVSDK Server for Remote Communication](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Remote-Drone-Programming-Workflow-Guide-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 2]: Setting up the MAVSDK-Python Development Environment](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Lab-Communication-Architecture-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 1]: Introduction to MAVSDK and Programming Prerequisites](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Development-Architecture-Overview-768x429.png)
![[PX4 ROS 2 Programming] Part 6: Latest & Experimental Features (Interface Library and Translation Node)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/Drone-Interface-Library-Architecture-768x429.png)
![[PX4 ROS 2 Programming] Part 5: Advanced Techniques (Service Servers and Multi-Vehicle Simulation)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/multi-vehicle1-768x429.png)
![[PX4 ROS 2 Programming] Part 4: Offboard Control (Drone Position and Trajectory Control)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/Autonomous-Drone-Takeoff-Control-Guide-768x429.png)
![[PX4 ROS 2 Programming] Part 3: Writing Basic ROS 2 Nodes (Listener & Advertiser)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/uXRCE-DDS-브릿지-768x429.png)
![[PX4 ROS 2 Programming] Part 2: Essential Precautions for ROS 2 Programming (QoS, Coordinate Frames, and Time Sync)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/image-36-768x319.png)
![[PX4 ROS 2 Programming] Part 1: Understanding PX4-ROS 2 Architecture and Environment Setup](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/image-34-768x294.png)